






2D激光雷達除了實現定位、建圖、多點觸摸等應用外,還能用來做3D建模與環境掃描。肯定會有人好奇,2D激光雷達掃描出來的圖像應該是平面圖,怎么將2D平面圖變為三維的立體圖呢?
目前市面上實現這種效果的方式主要有兩種:
一種是采用現狀激光器,將原先的一個點變成一條線型光,如下圖的效果:

另一種方式是使用一個2D激光雷達掃描,同時在另一個軸進行旋轉,從而掃描出3D信息。
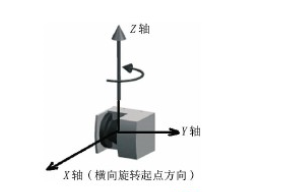
以下主要為大家介紹第二種方法,通過激光雷達的不斷掃描,不需反射棱鏡即可快速獲取各轉角情況下目標物體掃描截面到掃描儀的具體點云數據,同時獲取被測物體表面的三維坐標,高效地對真實世界進行三維建模和虛擬重現。

當然這種方法雖然可以比較方便的將2D激光雷達進行改造,能快速、自動、實時獲取目標表面三維數據,但由于需要控制額外自由度的轉軸,要注意控制誤差的問題。
2D激光雷達實現3D建模應用,對激光雷達的性能是有一定要求的,掃描頻率和采樣次數作為雷達的核心參數,在工作的過程中,獲取足夠多的點,更精細的掃描到環境中的特征,更好的完成定位導航、空間環境測繪和地圖構建,以及實現多媒體應用中更高靈敏的觸摸表現。
目前市面上實現這種效果的方式主要有兩種:
一種是采用現狀激光器,將原先的一個點變成一條線型光,如下圖的效果:
另一種方式是使用一個2D激光雷達掃描,同時在另一個軸進行旋轉,從而掃描出3D信息。
以下主要為大家介紹第二種方法,通過激光雷達的不斷掃描,不需反射棱鏡即可快速獲取各轉角情況下目標物體掃描截面到掃描儀的具體點云數據,同時獲取被測物體表面的三維坐標,高效地對真實世界進行三維建模和虛擬重現。
當然這種方法雖然可以比較方便的將2D激光雷達進行改造,能快速、自動、實時獲取目標表面三維數據,但由于需要控制額外自由度的轉軸,要注意控制誤差的問題。
2D激光雷達實現3D建模應用,對激光雷達的性能是有一定要求的,掃描頻率和采樣次數作為雷達的核心參數,在工作的過程中,獲取足夠多的點,更精細的掃描到環境中的特征,更好的完成定位導航、空間環境測繪和地圖構建,以及實現多媒體應用中更高靈敏的觸摸表現。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

