




如圖3所示,該恒流源由運放U1和三極管T1,達林頓管Q2進行電流放大,再通過U2放大反饋,從而實現恒流輸出。TQ2以大功率達林頓管為調整管,將其接成射極輸出的形式,半導體激光器(LD)作為負載串聯在達林頓管的發射極,通過控制達林頓管的基極實現對激光器電流的控制。本設計要求電路最大能輸出3 A工作電流,這就要求推動達林頓管的基極電流也比較大,但因集成運算放大器一般工作在小電流狀態,不能直接推動達林頓管正常工作,即使勉強推動其工作也會造成集成運算放大器本身功耗過大,溫升過高,影響電路的輸出精度,所以采用小功率三極管T1推動大功率達林頓管工作。采樣電阻接在激光器下端,采樣信號經過由U2組成的同相比例放大環節放大后再接回到U1的反相輸入端,構成電流負反饋電路,達到輸出恒流的目的。
2.3 激光功率的穩定控制
光功率反饋采用外部監測光電二極管的輸出光電流,由放大器再經A/D轉換后送CPU處理,得出控制量,調整激光器的工作電流,從而進行激光功率的閉環控制。
溫度控制在本系統中采用了半導體制冷來實現,這是一種熱電制冷器,只要控制流過溫控器電流的大小和方向,就能對激光器進行制冷或加熱,從而控制激光器的工作溫度。
2.4 保護電路
雖然慢啟動電路消除了高頻沖擊電流的危害,但不能有效地防止直流或低頻電流過載對半導體激光器的危害,因此,應當設立過載保護電路。一般可采用限流式保護電路。若長時間工作于短路的情況下,過熱仍然會導致調整管的損壞,此時可以采取截流式保護電路。過電壓保護的精度主要取決于穩壓二極管,而其工作點是隨流經穩壓管的電流和環境溫度變化的,因此,設計上必須選用穩定電壓的溫漂非常小的穩壓管。
3 軟件設計
本系統軟件采用模塊化的結構設計,自頂向下,逐步細化,利用子程序構成各模塊,如初始化模塊、鍵盤模塊、顯示模塊等。主程序流程圖如圖4所示。
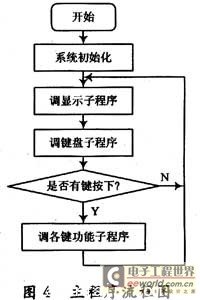
在主程序流程中,系統上電復位后,開始進行各模塊初始化,然后調顯示子程序,顯示數據,再調鍵掃描子程序,若有鍵按下,則調相應的鍵功能程序,若無鍵按下,則循環調用顯示程序。
4 結 語
本文中設計的半導體激光器驅動電源的控制系統通過慢啟動電路、恒流源電路和光功率反饋電路等,解決了恒流和在工作溫度范圍內輸出功率的不穩定問題,穩定度較高。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

































 關注我們
關注我們

