






引言
由于逆變器傳遞函數不易得到,而且電壓輸出經常波動,傳統的單純PID控制難以達到快速和穩定的響應,而模糊控制與PID相結合的控制方法,通過對誤差量的變化實時分析,調整PID參數,達到快速響應和無差跟蹤,可實現逆變電源的高精度實時控制。
1 模糊控制系統原理
模糊PID控制器以電壓偏差e 和偏差變化量ec作為輸入,PID 參數模糊自整定是找出PID 三個參數與e 和ec 之間的模糊關系,在程序運行中通過不斷檢測e 和ec,根據模糊控制原理對三個參數進行在線修改,以滿足不同e 和ec 對控制參數的不同要求,從而使被控對象有良好的動、靜態性能。其在線自校正工作流程如圖1所示。
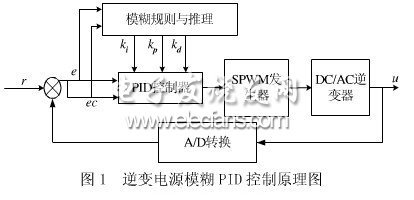
圖中:ki、kp、kd分別為積分增益系數、比例增益系數和微分增益系數。
1.1 PID調整控制器
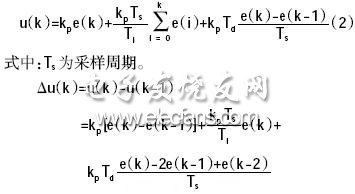
圖1 中r 為給定參考電壓,u 是逆變器實際輸出電壓,e 是偏差信號,ec 是偏差變化率。模擬形式的PID控制算式為

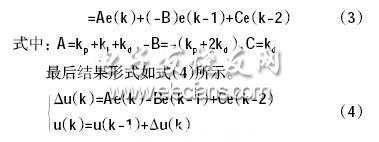
本文采用TMSLF2407實現數字PID控制,對式(1)進行離散化,可得到式(2)PID 控制的離散形式,為了增加系統的可靠性,采用增量式PID控制算式,式(2)為第k 次PID控制器的輸出量,減去第k-1次PID 控制器的輸出量即可得到式(3)增量式PID 控制算式。
1.2 模糊PID的實現
DC轅AC逆變電源控制的主要是輸出電壓及頻率的準確性。頻率的準確性由PWM發生器決定(它是一個存貯在存儲器內的一個正弦輸出表格),只要觸發計算準確就能達到設計要求。負載的變化使輸出電流產生變化,對于一定脈寬輸出的DC轅AC電源來說,勢必導致輸出電壓的變化。因此采用模糊控制規則根據不同的渣e渣和渣ec渣,對PID控制器的參數kp、ki、kd進行在線自整定來調節輸出電壓。模糊控制器的輸入變量是偏差絕對值渣E渣、偏差變化率絕對值渣EC渣,
模糊控制器的輸出是PID 控制器的比例增益系數KP、積分增益系數KI和微分增益系數KD。本文采用CRI(Compositional Rule of Inference)推理法設計模糊規則,為了在實時控制中避免關系矩陣的合成運算,先在脫機狀態下把所有可能的輸入和輸出情況計算出來,形成一張控制表去執行控制,控制表是以整數形式表示的,為了能產生控制表,在CRI推理法中把語言變量的論域轉換成有限整數的論域,本質上是把連續論域離散后產生離散論域。采用式(5)可以將連續域離散化到整數論域N。

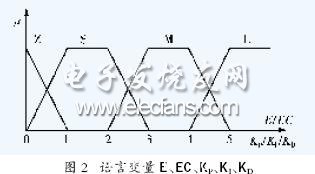
本文中,各語言變量的擋數均為4 擋(零、小、中、大),因此取整數論域N 為{0,1,2,3,4,5,6}。此時,如圖2所示,可取語言變量值4擋如下:
大(L)———取在5、6附近
中(M)———取在3、4附近
小(S)———取在1、2附近
零(Z)———取在0附近
在本文中利用CRI法推理時,控制過程是用查控制表來產生控制量的,在控制表中,模糊偏差量渣E渣、模糊偏差變化率渣EC渣,PID控制器的模糊比例增益系數KP、模糊積分增益系數KI和模糊微分增益系數KD都是用其對應整數論域的元素來表示的。對于單個實時精確量利用式(5),得到的結果再四舍五入,就求出了對應整數論域的相應元素,從而實現了輸入量的模糊化。
針對不同的e 和ec,kp,ki,kd的整定原則為:
1)當渣e渣較大時,為使系統具有較好的跟蹤性能,應取較大的kp與較小的kd,同時為避免系統響應出現較大的超調,應對積分作用加以限制,通常取ki=0。
2)當渣e渣和渣ec渣中等大小時,為使系統具有較小的超調,kp應取小一些,在這種情況下,kd的取值對系統的影響較大,應取小一些,ki的取值要適當。
3)當渣e渣較小時,為使系統具有較好的穩定性能,kp和ki 均應取大些,同時為避免系統在設定值時出現振蕩,并考慮系統抗干擾的性能,當渣ec渣較大時,kd
可取小些;渣ec渣較小時kd可取得較大些。
根據以上整定原則和總結工程設計人員的技術知識和操作經驗,建立了表1所列的模糊規則表。
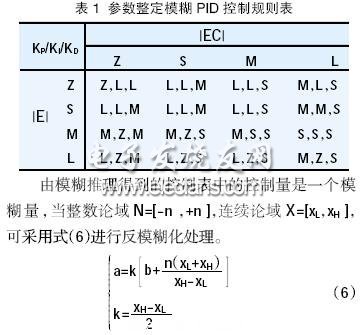
式中:k 為模糊控制中對模糊量進行反模糊化時的比例因子。
1.3 DSP 軟件算法實現
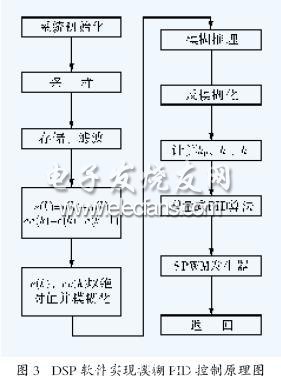
為了保證模糊PID 控制的實時性和準確性,DSP在A/D采樣的中斷子程序中就調用模糊PID控制算法程序,立即計算出輸出控制量并送到被控對象,根據TMSLF2407 的性能,機器時鐘周期和中斷延時可以計算出本系統從采樣當前實際輸出值到輸出控制量大約需要6.67 滋s ,這對于1ms一次的采樣來說是足夠的,完全滿足實時性要求。程序流程圖如圖3所示。
下面是部分程序。
執行PID控制
PID_Control:
SETC SXM
SETC OVM
SPM #O
LDP #4
LACL ADRESULTSACL PID_input
DALL Fuzzy_PID_table
反模糊變化程序
Fuzzy_PI_end:
LT k1
MPY Fuzzy_K
PAC
SACL Kp
LT k2
MPY Fuzzy_K
PAC
SACL Ki
LT k3
MPY Fuzzy_K
PAC
SACL K
RET
2 實驗結果
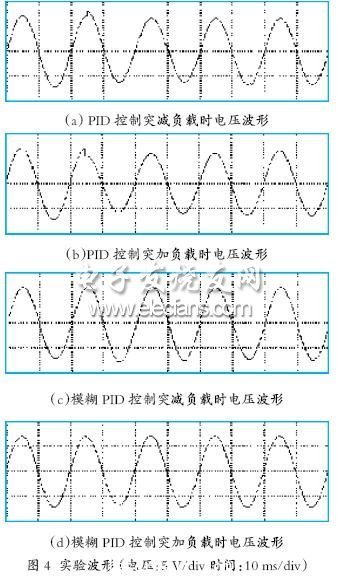
圖4為實驗波形,其中(a)、(b )為PID控制時突減負載、突加負載時的電壓波形。(c)、(d )為模糊PID控制時突減負載、突加負載的電壓波形,從實驗結果可以看出采用模糊PID控制的方法與一般的PID 控制方法相比具有動態響應速度快、超調小,輸出穩定后其幅值變化很小,突加、減負載時電壓變化幅值小的優點,因而能更有效地抑制負載突變或外界干擾對電壓的影響。
3 結語
1)模糊PID控制器既具有模糊控制的自適應能力,又具有PID控制器靈活性的特點。
2)模糊控制作為一種智能控制方法,在逆變電源電壓控制應用中獲得了較好的控制效果,具有控制精度高,實時性、穩態輸出特性好等優點。#p#分頁標題#e#
3)采用DSP控制系統在滿足逆變電源控制的要求下,具有成本低、控制靈活、可靠性高的特點。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

