






摘 要:在介紹步進電機升降頻調速原理及快速精確定位方法的基礎上,提出了利用PLC的高速脈沖輸出實現步進電機位置控制功能的方法,給出了精確定位的控制方案及軟件實現方法。
關鍵詞:步進電機,PLC,定位,S7-200,精確
Abstract:This paper introduces the theory of speed regulation and the method of position control quickly and accurately for stepper-motor. It realized accurately orientation for stepper-motor with high-pulse output of PLC.
Keywords:Stepper-motor,PLC,position control,S7-200,accuracy
0 引言
步進電機是一種將電脈沖轉化為角位移的執行機構。當步進驅動器接收到一個脈沖信號時就驅動步進電機按設定的方向轉動一個固定的角度(稱為“步距角”),其旋轉以固定的角度運行。可以通過控制脈沖個數來控制角位移量以達到準確定位的目的;同時也可以通過控制脈沖頻率來控制電機轉動的速度和加速度而達到調速的目的。步進電機作為一種控制用的特種電機,因其沒有積累誤差(精度為100%)而廣泛應用于各種開環控制。
可編程序控制器(PLC)是專為在工業環境下應用而設計的一種工業控制計算機,具有抗干擾能力強、可靠性極高、體積小等顯著優點,是實現機電一體化的理想控制裝置。通過對步進電機定位與Siemens PLC的深入研究,本文提出了利用PLC的高速脈沖輸出實現步進電機位置控制功能的有關見解與方法,介紹了步進電機加減速控制原理以及用PLC實現步進電機快速精確定位的方法,給出了位置控制系統方案及軟件設計思路,在實驗室內運行通過,對于工礦企業實現相關步進電機的精確定位控制具有較高的應用與參考價值。
1 定位原理及方案
1.1 步進電機加減速控制原理
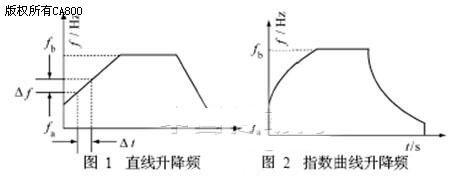
步進電機驅動執行機構從一個位置向另一個位置移動時,要經歷升速、恒速和減速過程。當步進電機的運行頻率低于其本身起動頻率時,可以用運行頻率直接起動并以此頻率運行,需要停止時,可從運行頻率直接降到零速。當步進電機運行頻率fb>fa(有載起動時的起動頻率)時,若直接用fb頻率起動會造成步進電機失步甚至堵轉。同樣在fb頻率下突然停止時,由于慣性作用,步進電機會發生過沖,影響定位精度。如果非常緩慢的升降速,步進電機雖然不會產生失步和過沖現象,但影響了執行機構的工作效率。所以對步進電機加減速要保證在不失步和過沖前提下,用最快的速度(或最短的時間)移動到指定位置。
步進電機常用的升降頻控制方法有2種:直線升降頻(圖1)和指數曲線升降頻(圖2)。指數曲線法具有較強的跟蹤能力,但當速度變化較大時平衡性差。直線法平穩性好,適用于速度變化較大的快速定位方式。以恒定的加速度升降,規律簡練,用軟件實現比較簡單,本文即采用此方法。
1.2 定位方案
要保證系統的定位精度,脈沖當量即步進電機轉一個步距角所移動的距離不能太大,而且步進電機的升降速要緩慢,以防止產生失步或過沖現象。但這兩個因素合在一起帶來了一個突出問題:定位時間太長,影響執行機構的工作效率。因此要獲得高的定位速度,同時又要保證定位精度,可以把整個定位過程劃分為兩個階段:粗定位階段和精定位階段。粗定位階段,采用較大的脈沖當量,如0.1mm/步或1mm/步,甚至更高。精定位階段,為了保證定位精度,換用較小的脈沖當量,如0.01mm/步。雖然脈沖當量變小,但由于精定位行程很短(可定為全行程的五十分之一左右),并不會影響到定位速度。為了實現此目的,機械方面可通過采用不同變速機構實現。
工業機床控制在工業自動化控制中占有重要位置,定位鉆孔是常用工步。設刀具或工作臺欲從A點移至C點,已知AC=200mm,把AC劃分為AB與BC 兩段,AB=196mm,BC=4mm,AB段為粗定位行程,采用0.1mm/步的脈沖當量依據直線升降頻規律快速移動,BC段為精定位行程,采用 0.01mm/步的脈沖當量,以B點的低頻恒速運動完成精確定位。在粗定位結束進入精定位的同時,PLC自動實現變速機構的更換。
2 定位程序設計
2.1 PLC脈沖輸出指令
目前較為先進的PLC不僅具有滿足順序控制要求的基本邏輯指令,而且還提供了豐富的功能指令。Siemens S7-200系列PLC的PLUS指令在Q0.0和Q0.1輸出PTO或PWM高速脈沖,最大輸出頻率為20KHz。脈沖串(PTO)提供方波輸出(50%占空比),用戶控制周期和脈沖數。脈沖寬度可調制(PWM)酮能提供連續、變占空比輸出,用戶控制周期和脈沖寬度。本文采用PTO的多段管線工作方式實現粗定位,PTO的單段管線方式實現精定位,如圖3。
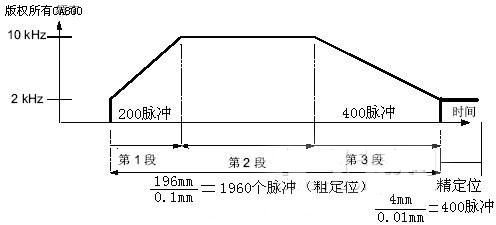
圖3 步進電機定位過程圖
上述例子中,假定電機的起動和結束頻率是2KHz,最大脈沖頻率是10KHz。在粗定位過程中,用200個脈沖完成升頻加速,400個脈沖完成降頻減速。使用PLC的PTO多段管線脈沖輸出時,用下面的公式計算升降頻過程中的脈沖增量值。
給定段的周期增量=(ECT—ICT)/Q
式中:ECT=該段結束周期時間
ICT=該段初始周期時間
利用這個公式,加速部分(第1段)周期增量為2,減速部分(第3段)周期增量為1。因第2段是恒速部分,故周期增量為0。如果PTO的包絡表從VB500開始存放,則表1為上例的包絡表值。

表1 粗定位的PTO多段管線包絡表值
2.2 源程序
//主程序
LD SM0.1 //首次掃描為1
R Q0.0,1 //復位映像寄存器位
CALL 0 //調用子程序0,初始化粗定位相關參數
LD M0.0 //粗定位完成
R Q0.0,1
CALL 1 //調用子程序1,初始化精定位相關參數
//子程序0,粗定位
LD SM0.0
MOVB 16#A0,SMB67 //設定控制字:允許PTO操作,選擇ms增量,選擇多段操作
MOVW 500,SMW168 //指定包絡表起始地址為V500
MOVB 3,VB500 //設定包絡
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

























 關注我們
關注我們

