






四、試驗結果
1、溫度漂移試驗
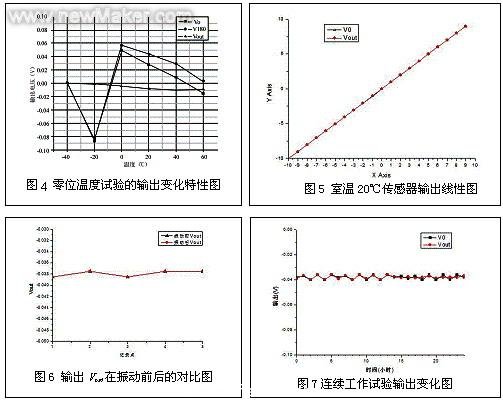
經過對傾角傳感器自動調零原理的研究,設計并實現了自動調零伺服傾角傳感器樣機。為了驗證自動調零伺服傾角傳感器的自動調零和消除漂移特性,對此傾角傳感器進行高低溫試驗。其溫度試驗結果如表1所示,其中V0和V180是內部傾角傳感器在自動調零校正操作時在兩個測量位置直接讀取的,而Vout是調零校正后的計算結果(下同)。

然后對結果進行修正,用于對數據進行分析,修正后的結果如表2所示。可以得到溫度變化-輸出變化特性圖,如圖4所示。可以看出,在低溫-40℃到高溫60℃的溫度范圍內,內部傾角傳感器的輸出V0具有最大為0.135V的溫度靈敏性。而當經過偏移校正后,傾角傳感器的輸出Vout具有最大為0.01V的溫度靈敏性。也就是說此傾角傳感器的零位溫度系數小于0.0001°/℃,其調零精度達到0.01°,達到了自動調零的目的,能夠滿足測試設備的要求。
2.零位重復性試驗
零位重復性是指傾角傳感器偏離零位后再恢復至零位時傾角的變化值。其數據記錄結果如表3所示。對數據記錄分析可知,自動調零伺服傾角傳感器的零位重復性為0.001°。
3.誤差分析試驗
常溫20℃,在-10°~10°范圍內對傾角傳感器進行測試,分別記錄V0、V180和Vout。根據測的數據可以得到此傾角傳感器的在20℃時的線性圖如圖5。

根據以上測得的數據可以計算出此傾角傳感器輸出Vout在全量程范圍內的非線性誤差為0.02°,能夠滿足測試設備的要求。
4.振動試驗
將傾角傳感器放在振動臺上進行振動試驗,振動試驗的技術條件如表4所示。記錄振動試驗前后傾角傳感器的零位輸出V0、V180和Vout。其試驗數據如表5所示。
經過對以上數據的分析,畫出Vout在振動前后的對比圖如圖6所示。從圖中可以看出自動調零伺服傾角傳感器具有良好的抗振動和抗沖擊性能,能夠滿足測試設備的要求。
5.連續工作試驗
連續工作試驗是指將自動調零伺服傾角傳感器通電使之連續工作24小時,并在每隔1小時時記錄其數據輸出V0、V180和Vout的值。根據連續工作試驗記錄可以畫出其連續工作的輸出變化圖,如圖7所示。
五.試驗結果
經過對自動調零伺服傾角傳感器樣機進行試驗,最終測得其技術參數如下:
六.結束語
零位偏差和漂移是所有傳感器都待解決的技術難題,本文通過研究自動調零的模型和方法及補償量的算法,建立一套傾角傳感器自動調零的理論和方法,設計實現了自動調零伺服傾角傳感器樣機,經過試驗證明其具有良好的自動調零特性并能夠消除漂移問題,具有非常重要的應用價值
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

