






摘 要:簡單介紹了CAN總線的來源、現狀及存在的問題;針對CAN總線傳輸距離存在的問題提出了兩個解決方案,并進行了實驗和比較,試驗結果證明本文的方法提高了傳輸距離的可靠性。
關鍵詞:現場總線、CAN總線、單片機
Two Solutions Deal With The Problem Of CAN Bus Transport Distance
Abstract:In this paper, the origin, actuality and problems still exist are introduced briefly. Two solutions are proposed to deal with the problem of CAN bus transport distance. Some experiments are carried out and the results are compared. The results demonstrate that the proposed method enhance the reliability the transport distance
Keywords:Field bus, CAN bus,chip microcomputer
1、 CAN總線簡介
1.1 CAN總線發展概況[1]
CAN網絡原本是德國Bosch公司為歐洲汽車市場所開發的,希望此項技術取代原本昂貴的汽車配線。CAN網絡具有反映可靠度高的特性,使用于實時處理的場合,例如汽車防鎖死系統、安全氣囊等。今天此項通訊協議已得到廣泛應用,其特色不僅在汽車工業,在工業控制的其他領域也發揮了其強大的能力。CAN 總線在國內發展已經二三十年了,很多關于CAN的產品也已經開發和廣泛使用,如:變電廠、機場、污水處理廠等。
1.2 CAN總線存在的問題
盡管CAN總線有很多優點,但是下面兩點卻制約著其發展,即:CAN總線的瓶頸問題。
(1) 傳輸距離最大只能達到10Km,而且并不是真正的可靠傳輸;
(2) 節點數量最多只能有110個。
下面將針對CAN總線瓶頸問題(1)做詳細的討論。
2、 針對CAN總線傳輸距離問題提出的方案
2.1 CAN總線結構[2]
CAN總線系統一般連接結構如圖(以芯片82C250為例)所示,R=120Ω。(注:圖中僅畫出了一個智能設備,實際中可以最多達110個)
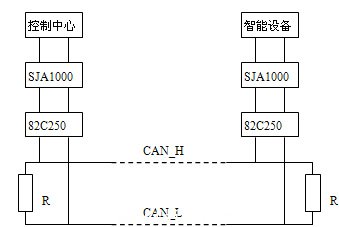
圖1 CAN總線系統結構示意圖
CAN總線一般都是利用在環境比較惡劣,控制室與現場比較遠的場合。總線距離達到8Km以上時,其單向線路電阻將達到100Ω,而兩端的終端電阻為120Ω(不考慮智能設備本身電阻,認為其電阻為無限大)。其等效電路為圖2:
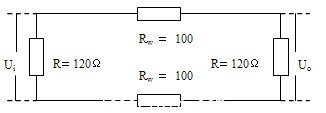
圖2 CAN總線電路等效圖
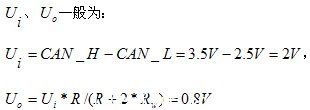
對于CAN接收器而言能夠識別的電壓要大于0.8V,一般為0.9V以上。
2.2 針對傳輸距離問題所作的嘗試方案
從上面的電路圖以及數據分析可以看出:在距離偏遠時,總線線電壓已經處于臨界識別狀態,其數據很難正常接收(已經沒有可靠性可言)。為此我們嘗試采用以下幾個方案進行了實驗。
2.2.1 在線路中直接加兩個發送芯片
該方案就是在總線線路中直接加入兩個發送芯片(采用82C250為例)[3],并把發送芯片的管腳TXD和RXD對連。其連接電路如下:

圖3 發送芯片連接電路圖
整個電路看似很正常,把左邊的數據傳輸到右邊,右邊的數據傳輸到左邊,實際上此電路是無法使用的。此電路接入總線后,只要在總線上有一個顯性電平出現,那么整個電路將永遠呈現顯性電平。原因在于每個期間都有延遲(雖然是僅僅幾個ns延遲),假設從電路左邊收到一個顯性電平,經過左右兩個82C250 芯片延遲Tns后傳輸到右邊CAN總線,另外82C250芯片本身具有同時發送、接收功能,那么右邊的82C250芯片同時把右邊CAN總線的顯性電平又傳送到左邊,這樣就形成了一個回路,使得總線永遠處于顯性狀態。
2.2.2 加入邏輯控制電路進行隔離
從上面可以看出,在發送數據時應該防止數據重傳形成回路。為此我們做了如下規定:在有顯性電平時只能夠有一個方向傳輸(哪個方向先來顯性電平開通哪個方向,同時到來則選擇任一個方向開通);發送端顯性電平結束后,所有方向都停止T1時間(Tns
利用CPLD很容易實現上面的規定邏輯。利用此方案把該電路先連接在總線10Km處,并在10Km不遠處連接一個接收設備,實驗能夠接收正常,并且其接收端總線電壓差為1.32V,是單連設備接收電壓差的1.55倍。
2.2.3 線路中間加入CAN卡中轉實現遠距離數據傳輸(中繼器)
在距離達到10Km時,其接收數據不正常的原因是由于總線電壓差值較小的緣故。為此,有的采用升壓和降壓電路是不現實的,因為每個接收器都得加入一個調理電路,造價很明顯就上去了。另外,即使升壓了,由于CAN總線按照仲裁發送決定了總要遇到方案二中提到的由于延遲總線形成閉合回路的問題。
為了達到遠距離傳輸,可以在中間加入中繼器,相當于把總線距離縮短了一倍。中繼器的結構如下:

圖4 中繼器結構示意圖
選擇使用兩個8031單片機目的在于能夠及時處理CAN總線上的數據,使得設計也變得比較簡單,不需考慮CAN總線兩邊的數據發送沖突。只要每個單片機有1K的緩存就可以。
具體實現思路:單片機接收CAN總線數據,把數據進行緩存,在空閑階段把數據傳輸到另一個單片機(兩者之間通過SPI協議實現通信),同時把從另一個單片機傳輸來的數據發送出去。
在實際的工程中我們是利用此方案實現遠距離傳輸的,主要原因是可以滿足數據傳輸的可靠性,利用此方案的電路我們進行過節點數達到100的測試,其性能正常、可靠,能夠滿足實際的需要。
3、 總結
本文的創新點提出了解決CAN總線傳輸遠距離問題的可實施方案,第一個(加入邏輯電路)比較簡單,而且不用考慮數據存儲,僅僅是一個硬件實現;而第二種(中繼器)要考慮數據存儲、判斷何時發送等情況,相對比較復雜,但可靠性要好些。兩個方案在承受負載方面能力差不多。
CAN總線技術作為一種新型的總線技術由于其具有良好的故障隔離能力、網絡的實時響應能力以及CAN具有良好地傳輸防錯設計等,使其已經成為現在最有前途的總線之一。#p#分頁標題#e#
參考文獻
[1] 陽憲惠. 現場總線技術及其應用. 北京: 清華大學出版社, 1999.
[2] 鄔寬明. CAN總線原理和應用系統設計. 北京: 北京航空航天大學出版社, 1996.
[3] 郭湛,宋存義,李海 基于CAN總線的火電廠貯煤筒倉安全監測系統 微計算機信息,2005.9(2)P5~7
作者簡介:范瑞霞(1951-),研究員,本科,畢業于北京理工大學,主要研究方向:智能控制,計算機視覺;李位星(1976-),助工,碩士,畢業于北京理工大學,主要研究方向:計算機控制,圖像處理。
通訊地址:北京理工大學自動控制系206教研室 郵編:100081
FAN Rui-xia LI We-ixing
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

