




2 系統的硬件結構設計與實現
本系統的硬件結構如圖2所示。
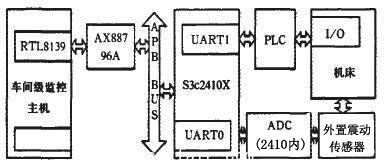
圖2 系統硬件結構圖
在此系統中,主要部件功能如下:
1)車間級監控主機是本系統的前端工控機,通過RTL8139網卡與后端核心控制模塊相連,向控制模塊發送對機床的控制命令或程序代碼,以及通過控制模塊接收來自機床的狀態信息,監控主機將接收到的狀態信息實時寫入數據庫,并且可以將必要的狀態信息打包,通過互聯網發送到遠程,進行遠程故障診斷。
2)該系統中最核心的部分是基于S3C2410X的嵌入式控制模塊,該模塊擴展集成了AX88796A網絡芯片,通過該芯片與監控主機通信。此外,控制模塊內部集成了UART控制器,利用該控制器與機床相連,接收和發送機床狀態信息和控制命令。3)機床部分,則由PLC的I/O口接收和發送機床狀態信息及控制命令;另外,機床的刀具部分,由外部傳感器獲得刀具狀態,然后將信號發送到嵌入式處理器,再通過ADC將模擬信號轉換成數字信號。
3系統軟件設計與實現
該系統采用了裁剪和優化后的嵌入式Linux操作系統,使用嵌入式數據庫SQLite來存儲機床的狀態信息,系統具有自動報警等智能功能,能根據特定的報警信號發送控制命令,以保證系統安全運行。系統主要包括收發信號處理、智能控制、串口通信、網口通信等模塊,其中信號處理模塊、智能控制模塊功能如下:
1)收發信號處理模塊完成系統主要的功能,包括從前端工控機接收控制命令和程序代碼,經過處理后直接發向機床,接收來自機床PLC的狀態信息和經機床外置傳感器傳來的信息,經過處理發送給前端工控機,同時將狀態信息實時寫入嵌入式數據庫SQLite;
2)智能控制模塊主要對接受的機床狀態信息進行處理,判斷是普通狀態信息還是報警信息,如果是報警信息則根據不同的報警狀態自動發送控制命令到機床,以達到保護機床的目的,此外由于模塊內存儲器容量有限,使得嵌入式數據庫的數據量也有限,本模塊還負責對數據庫內的數據進行定期清理,刪除已經在前端監控主機備份的數據:本模塊主要代碼如下:

圖3 主程序流程示意圖
4結論
監控系統開發完成后,與經裁剪的嵌入式Linux操作系統一塊燒寫到S3C2410開發板中,配置好軟硬件環境進行實驗,經測試,本系統能完成所設計的各項功能,包括接收機床的狀態信息;接收監控主機發送的控制命令并發向機床:實時備份和清理嵌入式數據庫;模擬機床報警狀態智能發送控制命令到機床等。
本系統是基于嵌入式的數控機床遠程監控系統,相比傳統工控機有很多優點:
1)在監控范圍和兼容性方面,由于本系統采用模塊化設計,將核心模塊與機床相互獨立,即插即用,擴展性強,適合大范圍的監控需求:而傳統工控機控制模塊與機床緊密相關,兼容性不強,擴充不易,系統適用范圍較小。
2)在監控和維護方面,本系統可進行遠離現場環境的遠程監控,甚至能利用前端工控機將機床狀態信息發送到互聯網,實現網絡監控和維護;而傳統工控機一般不可能遠程維護,甚至大部分都是現場監控和維護,車間環境對工作人員健康影響較大且維護費用較高。
3)在系統成本上,本系統使用的是普通PC機作為前端監控機,價格低,整體系統方案簡單,方便審查,建設成本,維護成本和擴展成本低:傳統工控機使用的是專門的工作站,建設成本,維護成本和擴展成本很高。另一方面相比傳統工控機來說,本系統的硬件升級簡單,軟件更新方便,界面友好。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

































 關注我們
關注我們

