






引 言
現今數控技術的發展方向是開放式體系結構的數控系統,但是未來的開放式數控技術發展的主流是基于計算機標準總線的“PC+運動控制卡”結構。此類數控系統通常選用高速DSP作為運動控制卡CPU,采用主從式控制策略,利用PC和DSP都讀取內存的方式來實現上/下位機的通信;優點:信息處理能力強、開放程度高、運動軌跡控制準確、通用性好等特點,被廣泛應用于制造業自動化控制各個領域。
1 硬件電路總體設計
為實現對多電機的半閉環控制提供了一個良好的開發平臺。本項目是設計一款基于PCI總線的,以DSP芯片TMS320F2812為核心的多軸運動控制卡。將PC機的信息處理能力和開放式的特點與運動控制器的運動軌跡控制能力有機地結合在一起,利用雙口RAM作為公共存儲單元實現上/下位機的通信。
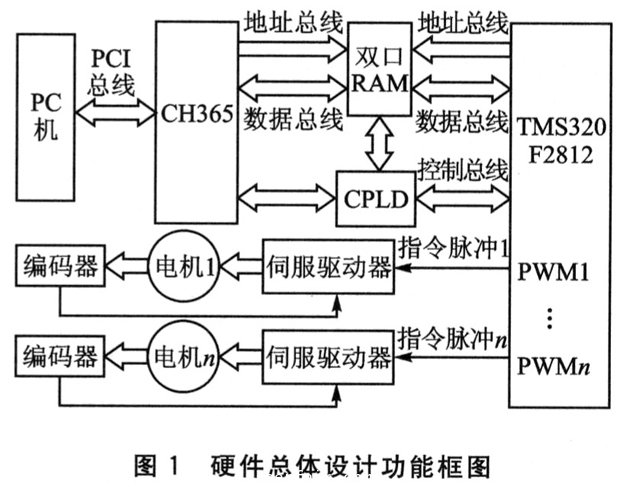
系統硬件總體設計功能框圖如圖1所示。
2 雙口RAM接口電路設計
2.1 雙口RAM與DSP和CH365的連接
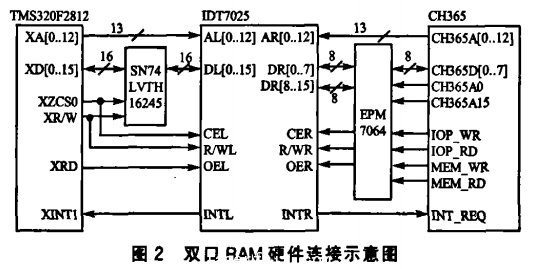
本系統選用雙口RAM芯片IDT7025作為DSP與CH365雙向通信的緩沖芯片。IDT7025芯片是一款高速的8K×16位雙口靜態RAM,它提供2個獨立的端口,允許兩個(左、右)端口同時讀/寫數據,每個端口具有自己獨立的控制信號線、地址線和數據線,可高速存取數據,可與大多數高速處理器配合使用,而無需插入等待狀態。
雙口RAM允許2個CPU同時讀取任何存儲單元(包括同時讀同一地址單元),但不允許同時寫或一讀一寫同一地址單元。本系統采用基于郵箱機制的INT中斷法處理雙口RAMD地址競爭沖突現象,避免由此而產生的讀/寫錯誤。
下面簡要介紹一下IDT7025中斷的原理:當用戶要用到中斷功能時,內存中的1FFE和1FFF單元將作為中斷標志郵箱傳遞命令信息。當左端口定義為寫狀態(CEL=R/WL=VIL),且在內存1FFF中進行寫操作時,右端口的中斷標志INTR為低電平,可以向右端口發出中斷請求;當右端口對地址1FFF進行訪問時(CER=OER=VIL),無論讀寫都可以清除右端口中斷標志INTR。相反也是一樣的,當右端口對內存1FFE進行寫操作時,左端口可以發出中斷請求;當左端口訪問地址1FFE時,清除左端口中斷標志。使用中斷時,向1FFF和1FFE寫的內容由用戶自行定義,本系統中設定:申請中斷時向郵箱寫入1或其他大于0的整數,清除中斷時向郵箱寫入0。
2.2 數據總線擴展電路設計
系統采用了雙口RAM作為DSP和CH365之間數據傳輸的緩沖芯片,而TMS320F2812的地址總線為19位,IDT7025為13位,CH365為16位,因此,把IDT7025的13位地址線A[O..12]分別與DSP的地址線XA[O..12]和CH365的地址線A[O..12]相連,并將CH365的地址線A0用作數據總線擴展的使能信號。
CPLD芯片選用A1tera公司生產的EPM7064,通過CH365地址線A0的使能對16位數據進行分時讀/寫,從而解決了數據總線的擴展問題。其內部邏輯電路如圖3所示,其中主要包括2個鎖存器(74373b),和2個三態門緩沖器(74541b)。
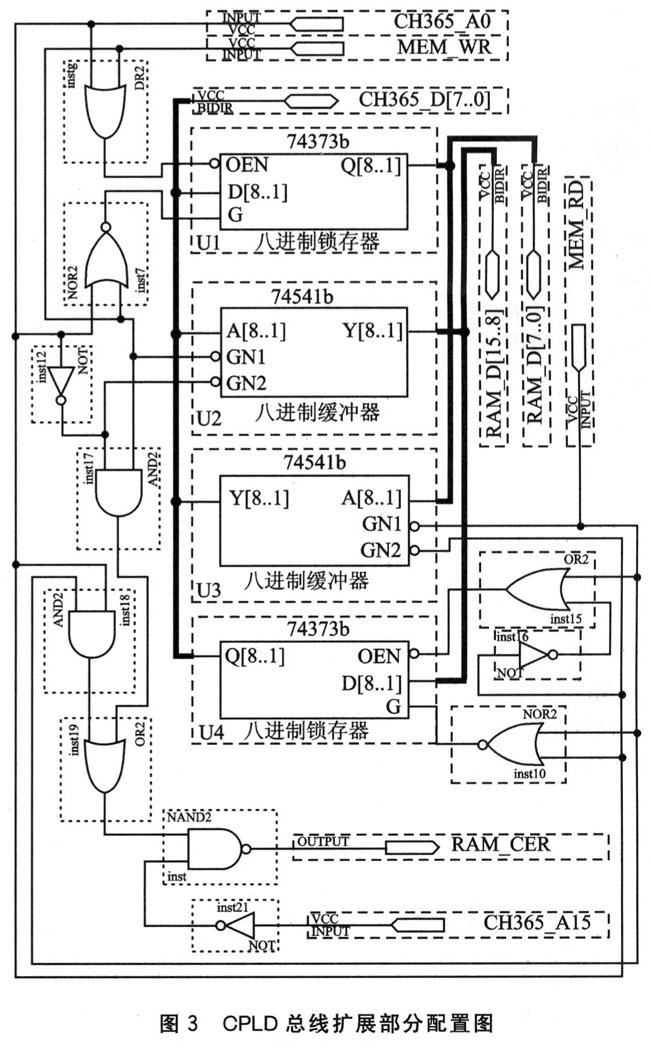
在本系統中,CH365向雙口RAM寫入數據時,首先CH365_A0為低電平,鎖存器U1使能信號G高電平有效,三態門U2無效(GN2為高電平),低8位寫入鎖存器;然后偏移地址加1,CH365_A0為高電平,三態門U2使能信號有效,高8位數據直接寫入雙口RAM,同時低8位數據通過鎖存器U1寫入雙口RAM(OEN為低電平)。CH365讀取雙口RAM數據時,首先CH365_A0為低電平,低8位數據通過三態門U3直接讀入到CH365中,高8位數據鎖存到鎖存器U4中;然后偏移地址自動加1,CH365_A0為高電平,高8位數據由鎖存器U4讀入CH365。
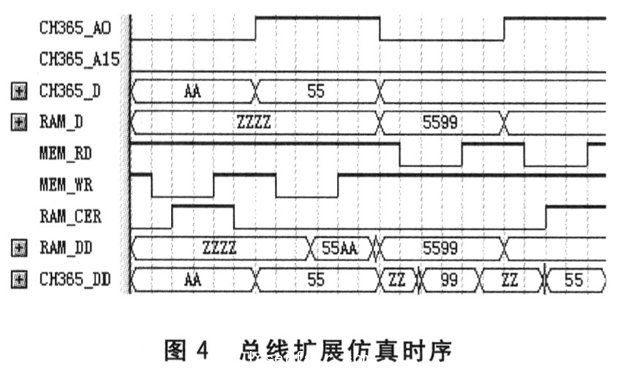
對上述邏輯關系用“MAX+PLUS”進行仿真后,得到圖4所示的時序。圖中RAM_DD和CH365_DD表示仿真結果,從圖中可知仿真結果完全符合設計要求。
3 上/下位機通信軟件設計
在硬件電路實現之后,把完成的板卡插于PC機的PCI插槽,上電后根據系統提示安裝CH365驅動程序,在正確安裝好硬件之后,利用API函數,就可以在VC環境下編寫和調試PCI和DSP的通信軟件了。
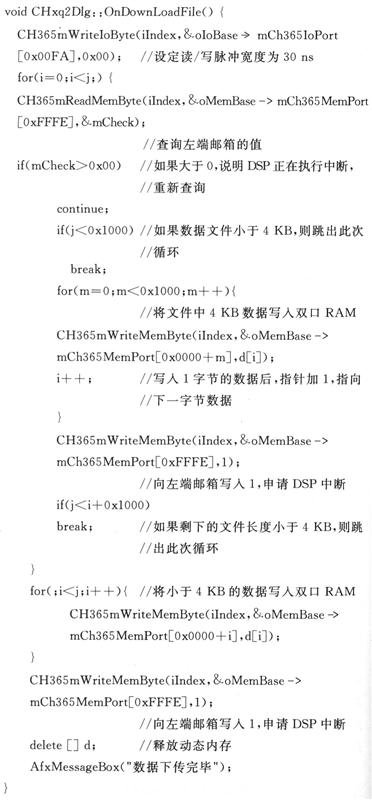
由上述可知,雙口RAM的高4 KB空間用于PC機向DSP下載數據,如果數據大于4 KB,則存在著一次不能夠把全部數據下載到DSP中的問題。因此,采取了向雙口RAM中循環寫入數據的辦法,即PC機向雙口RAM一次只寫入4 KB數據,接著向DSP申請中斷。DSP響應中斷一次性將4 KB數據復制到DSP其他大容量存儲空間(如擴展SRAM)中,然后釋放雙口RAM空間。此時PC機便可再寫入4 KB數據,如此循環往復,直到將所有數據都寫入DSP中。部分代碼如下:
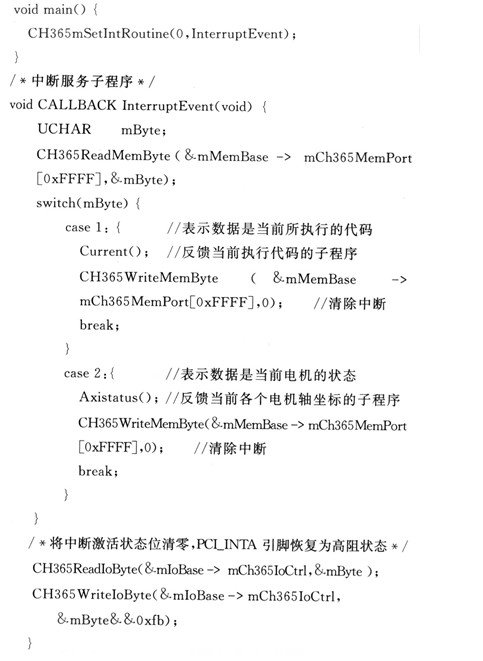
數據反饋功能主要是通過CH365響應DSP中斷來實現的。DSP程序將數據寫入雙口RAM低4 KB空間后向CH365申請中斷,CH365響應中斷將數據反饋到PC并顯示到人機界面。中斷函數部分代碼如下:
結 語
隨著計算機技術和電子技術的發展,將運算高速、功能強大的數字信號處理器應用于運動控制,可以實現復雜的控制算法和實現高精度、高速度、多軸聯動,在數控應用中,將會占據越來越重要的地位。而快速準確的通信又是這種運動控制器的基礎。本文介紹的通信方式,具有性能可靠,硬件結構簡單,價格便宜的優點,具有較好的應用前景。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

