






1 引言
主要用于石油管路鋪設的φ1100mm大口徑鋼管由板材經焊接后,其它輔助工藝與設備包括管內清渣機用于管內焊接后殘留的焊渣的清理;鋼管內壁除塵機、外焊清渣機等。本系統是最后一道工序,主要是對鋼管的總重量的測量以及長度的測量,并形成數據存貯起來。
2 原理設計
2.1 工藝概述
測量系統首先由橫移車將鋼管放到輸送輥道,然后由檢測開關發出鋼管到位信號傳送給本系統,由稱重裝置進行重量檢測,稱重裝置位于鋼管的底部,由液壓油缸頂起稱重裝置,這樣鋼管的重量完全由稱重裝置來承擔,左、右兩側各安裝一個稱重傳感器,通過rs232串行口與工控機通訊,將重量值傳給上位機。稱重完成后測量長度小車分別由兩側起始點同時啟動且相向而行,當快接近鋼管端面時(由接近開關發信號)小車減速運行,當行至鋼管端面時,小車停止運行,同時將鋼管長度計算出來傳至上位機。
2.2 系統組成
控制系統由接近開關采集現場信號送入西門子plcs7-216內,完成邏輯關系的運算,其結果輸出到安川sgdm-04ada驅動控制器,由sgmah-04a電機經齒輪、齒條傳動驅動測量小車,驅動系統由兩套組成,分別位于鋼管的兩側,工作時小車相向而行。液壓系統驅動稱重裝置,plc和稱重裝置分別與上位機組成串行通訊,上位機軟件采用visualbasic編制,通過編制的畫面發出指令并時實顯示鋼管重量及測量長度。系統硬件由西門子plc6es7216-2bd22-0xb0,通訊模塊6es7277-0aa22-0xba,擴展模塊6es7223-1hf22-0xa0組成。
2.3工作方式
控制系統具有手動/半自動/自動三種工作方式。手動工作方式下,可以分別對測量小車、稱重裝置進行單獨調整;半自動工作方式可以對鋼管進行單循環測量,即按啟動則開始稱重與測量,結束后等待下一啟動指令;自動工作方式則對鋼管連續測量,直到按下自動停止按鈕,方可停止。
3 系統實現
3.1 傳感器通訊編程
稱重傳感器采用的是美國zemic公司bm8h-5t,它通過信號分配器gm-jx-v與深圳市杰曼科技有限公司稱重管理器gm8803a連接,gm8803a最終與上位機進行rs232串通訊,其通訊協議尊循使用說明書中規定波率為9600kbty,奇偶校驗位為奇校驗,數據位為8位,站地址為2,停止位為1。按此規定用vb編寫上位機部分通訊協議程序如下:
dim rcvlenth
dim rcv() as bbte 定義模塊級變量
private lub form-load() 定義接收字符的動態數組
with mscomml
comport=2 選擇串口2
settings=”9600,n,8,1” 9600kbit/s, 奇校驗,8位數據位,1位停止位
injputmode = cominputmodebinary 以二進制格格式讀取接收緩沖區
rthershold=1 接收的字符數大于等于1就會產生接收事件
inputlen=0 讀接收緩沖區內容
outbuffercount =0 清空發送緩沖區
inbuffercornt=0 清空接收緩沖區
end with
if not mscomm1.portopen then
mscomm2.portopen=ture 打開串口2
end if
end sub
3.2 信號調理
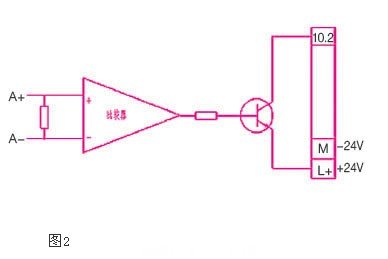
小車行走的距離通過旋轉編碼器反饋回來的脈沖接入plc的高數計數端子,通過計數值可以知道小車行走的長度,計算精度可達0.01mm。由于項目所用的高數計數器是ab正交輸入方式,只需將a+、b+及公共端接入plc即可,而伺服控制器脈沖輸出為a+a- b+ b- z+ z-,在調試中發現,plc的高數計數值不穩定,誤差很大,感覺有干擾存在,經分析認為是a- b-是干擾源,因此我們采用以上電路(如圖1所示),用比較器將a+a-進行比較后經三極管開關接入plc,問題得了解決,則即提升了電壓又抑制了干擾,取得了良好的效果:

3.3 編碼設計
伺服電機后端的旋轉編碼器的分辯率為13比特,即2048脈沖/轉,而電機轉速為3000r/min,plc最大捕捉頻率為20khz,為達到匹配,將驅動器的參數pn201分頻比設定為400,即達到400脈沖/轉,為進一步提高精度在plc中采用4倍分辨率,即為1600脈沖/轉,由此根據電機驅動齒輪、齒條轉一圈所走的距離計算出每個脈沖所走的距離,得出位移值。伺服系統采用多段速控制方式,p-son、n-cn、p-cl三端組合且設置以下參數:
pn000.1 設為3 設為多段速控制方式
pn201 設為400 設置倍頻
pn50c 設為8fea 41端子速度1;45端子速度2;46端子速度3
pn50a 設為2801 cn140端子輸入on;p-con無效;cn142端子禁止正轉
p n 50b 設為8843 cn143端子禁止反轉;cn144端子警報解除;p-cl\p-nl為無效;
pn50e 設為0000 對應端子無效
pn 50f 設為0001 25、26端子為扭矩限制檢測
3.4 plc通訊編程
plc與上位機通訊方式設為自由口方式,初始化程序設置sm30為05意義為:每個字符為8位,無校驗,波特率為19200,自由口方式。通訊協議規定為:
所有的發送數據格式為:
00h,總字節數,(數據),校驗碼,ffh
其中總字節數是包括00h到ffh在內的總數,占一個字節,校驗碼是包括00h和總字節數在內的校驗碼之前的所有數據的異或值,占一個字節。以下只對數據位格式進行說明。
數據位所占字節數不確定,格式如下:
a,(發送數)
其中a是對數據的說明,如果是命令,則a=07h,如果是數據,則a=15h,a占一個字節。
當a=07h時,發送數占一個字節,發送數的數據說明如下:
01h——與電腦連機
設備啟動后,在工作過程中,每次測量前向電腦發送一次此命令,電腦發回的回復信息與plc發出的數據相同,即:
00h,06h,07h,01h,00h,ffh
plc發送此命令后,如果在2秒內不能收到回復信息,再發送一次,如果2秒內還不能收到回復信息,則plc自動轉為自存儲方式,把本次測量的長度順序記錄在plc內存中,并不再發送稱重命令。如果在5秒內收到回復信息,plc首先把內存中的記錄發送給電腦,然后再正常工作,(即plc不再自存儲,直接把長度數據發送到電腦,并在每次工作都發送稱重命令);
02h——稱重命令#p#分頁標題#e#
電腦發回的回復信息與plc發出的數據相同,如果發出此命令后2秒內收不到回復信息,再 發送一次,如果2秒內還不能收到回復信息,則放棄。
03h——通知來料
無回復信息
當a=15h時,發送數占字節數未定,發送數的數據說明如下:
b,(bd1,bd2,bd3,…)
其中bd1,bd2,bd3,…為bcd碼,即每個字節都為0~9的數字,高位在前。
b說明如圖2所示。
回復信息:
00h,06h,15h,04h,17h,ffh
如果發出此數據后2秒內收不到回復信息,再發送一次,如果2秒內還不能收到回復信息,則放棄。
西門子s7-200自由口部分編碼通訊plc程序如下:
sbr1 子程序1 將接收到的字符依次放入接收緩沖區
network 1 網絡1
ld sm0.0
incb vb100 接收字節數加1
incd vd86 接收緩沖區指針加1
movb smb2, *vd86 將接收到的字符存入vd86指向的地址
int 0
network 1
ldb《》 smb2, 0 若不是起始字符0
creti 中斷返回
network 2
ld sm0.0 movb 0, vb100 將接收字節 計數器vb100清零
movd &vb100, vd86 指針vd86指向接收緩沖區首地址vb100
call sbr1 將起始字符存入接收緩存區的vb101
atch int1, 8 接收字符中斷連到int-1
int1
network 1
ld sm0.0
call sbr1 存放接收到的報文數據區字節數
movb smb2, vb99 將報文數據區字節數存于vb99
movb vb99, vb90 校驗碼字節vb90初始化
atch int2, 8 字符中斷事件連接以中斷程序2
int 2 接收數據區數據的中斷程序2
network 1
ld sm0.0
call sbr1 將收到的數據存入接收緩沖區
xorb smb2, vb90 將數據區的數據逐字節異或,計算校驗碼
decb vb99 數據字節計數器減1
network 2
ld sm1.0 零標志sm1.0=1,表示vb99=0,接收已完成
atch int3, 8 字符中斷事件連接到中斷程序3
int 3
network 1
ldb《》 vb90, smb2 如果校驗錯誤
atch int0, 8 重新啟動接收
creti 中斷返回
not 報文結束且校驗 正確
call sbr1
call sbr6
4 結束語
本項目采用plc與visualbasic工具設計和開發了大口徑鋼管的稱重與測量系統,系統穩定可靠,稱重準確度高,測長精度可達0.01mm,完全滿足工藝要求,使系統即有控制又有完整的人機界面,在使用過程受到了用戶的認可,且受到好評。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

























 關注我們
關注我們

