






位置環pid控制算法
在數字pid調節控制系統中,引入積分環節的目的是為了消除靜差,提高精度,但在過程的開始、結束或大幅增加設定值時,會產生積分積累,引起系統較大的超調,甚至震蕩,這對于伺服電機的運行來說是不利的。為減小電機在運行過程中積分校正對控制系統動態性能的影響,采用積分分離pid控制正當其時,當電機的實階位置與期望位置的誤差小于一定位置時,再恢復積分校正環節,以便消除系統的穩態誤差。
積分分離pid控制算法需設定積分分離閥ε,當|e(k)|》ε時,即偏差值較大時,采用pd控制,以保證伺服電機位置控制精度。
離散化pid控制算式是: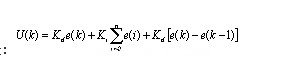
其中,k為采樣序號,k=0,1,2…;
kp、ki、kd分別表示比例,積分、微分系數。在實際中,若執行機構需要的是控制量的增量,根據遞堆原理可得增量式pid控制算式為:
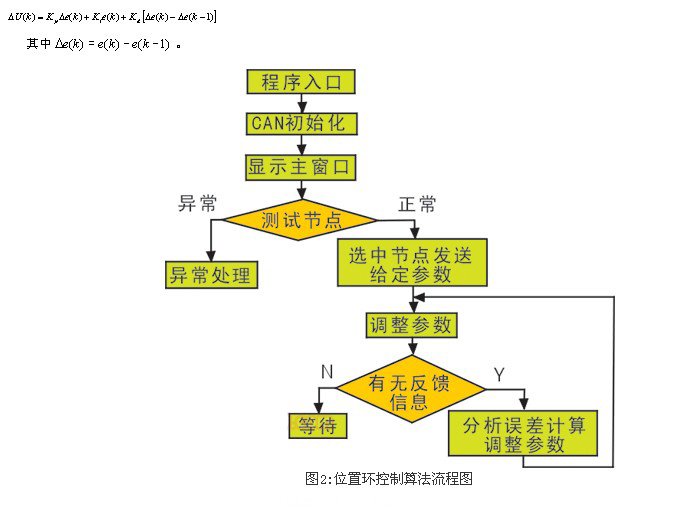
控制系統參數的整定
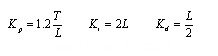
主控微機向控制卡發送pid參數,看給定的參數是否符合控制系統的要求,該過程需用參數整定實現。參數整定得主要任務是確定kp、ki、kd及采樣周期t,比例系數kp增大,使伺服驅動系統的動作靈敏,響應加快,而過大會引起振蕩,調節時間加長;積分系數ki增大,能消除系統穩態誤差,但穩定性下降;微分控制可以改善動態特性,是超調量減少,調整時間縮短。通常的方法有擴充臨界比例度法和擴充響應曲線法,以及歸一參數整定方法。這幾種方法源于使用齊格勒-尼柯爾斯(ziegler-nichols規則),通常可認為交流伺服系統的模型為一階段有延遲環節的模型(帶滯后的一階環節):
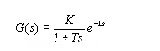
式中的一階段響應特征參數k、l、和t可以由圖3所示的s型響應曲線提取出來。求取這些參數對實際系統并不困難,可以通過對系統進行階躍輸入激勵,得到響應曲線,再根據曲線求出其特征參數。于是可由ziegler-nichols整定規則得到:
數字系統中采樣周期的選擇與系統的穩定性密切相關。一方面要滿足香農定理,即ωs≥2ωmax實際系統輸入及反饋的最大頻率ωmax難以測定,另一方面采樣周期并沒有一個精確的計算公式,只能根據工程應用按經驗規則選取,對于電機控制系統,要求較短時間采樣周期,通常為幾十毫秒。#p#分頁標題#e#
對于交流位置伺服控制系統而言,采用基于pc機的開發平臺,用常規的pid調節器進行控制,只要參數整定適當,加之系統的機械精度(運動軸、齒輪、電機絲杠傳動化)控制在一定誤差范圍內,電氣控制精度(編碼器脈沖)就可得到提高,魯棒性強,可以在很多場合達到較高精度位置控制的要求。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

