






da98b信號時序分析
一般來說,數控銑床、斜床身數控車床在上電正常、下電后,工作臺不會出現下滑現象。下文將主要針對上電、運動中報警、運行中斷使能、下電等瞬時可能下滑的情況予以分析說明。
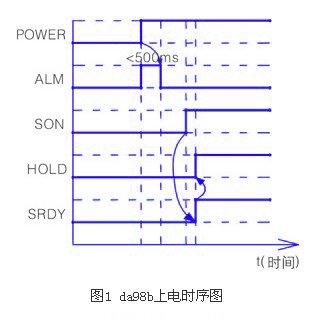
l上電過程
a. da98b得電后,先輸出一報警信號,待檢測到主回路直流母線電壓正常后(大約在500ms之內),關閉報警輸出;
b. 待外部son信號(伺服使能)有效后,延時電機激勵,并輸出srdy信號;
c. 電機激勵后,輸出hold信號。
da98b上電時序見圖1。
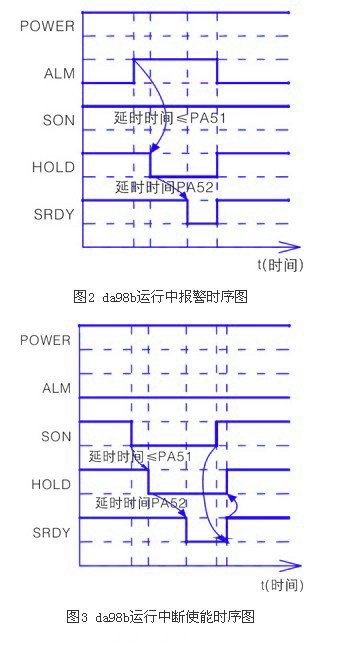
l運動中報警、運行中使能斷開
da98b在運動中報警、運行中使能斷開的處理上基本一致,過程如下:
a.在運行中檢測到報警或使能斷開后,在參數pa51設定的時間內,高速運轉中的電機先減速到參數pa53設定的值(如果電機當前的運行速度低于參數pa53設定的值,沒有減速過程);
b. 減速到參數pa53設定的值或延時參數pa51設定的時間后,關閉hold信號;
c. 延時參數pa52設定的時間后,電機斷開激勵,關閉srdy信號輸出。
da98b在運動中報警的時序見圖2,在運行中斷使能的時序見圖3。
參數說明:
pa51:允許失電制動器動作之前的最大減速時間,參數范圍為0~5000,單位ms。
pa52:伺服鎖定延時時間,參數范圍為0~5000,單位ms。
pa53:允許失電制動器動作時電機速度,參數范圍為0~3000,單位r/min。
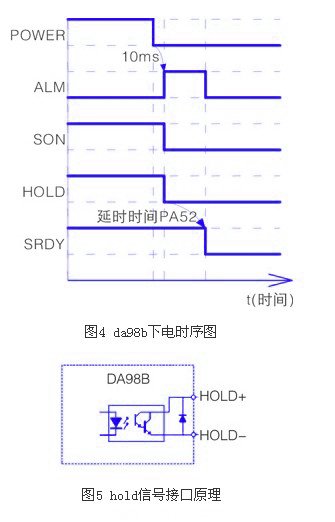
l下電過程
a. da98b斷電后,主回路交流側電壓掉電檢測信號持續10ms(防止由于電源電壓波動引起的誤認為斷電)后,輸出掉電警信號;
b. 關閉hold信號;
c. 延時參數pa52設定的時間后,電機斷開激勵,并關閉srdy信號輸出。
da98b下電時序見圖4。得出使用hold信號進行失電制動器控制完全可以滿足上電、下電、伺服報警等不同情況的抱閘控制的要求。da98b的hold信號采用集電極開路輸出,接口原理如圖5所示。
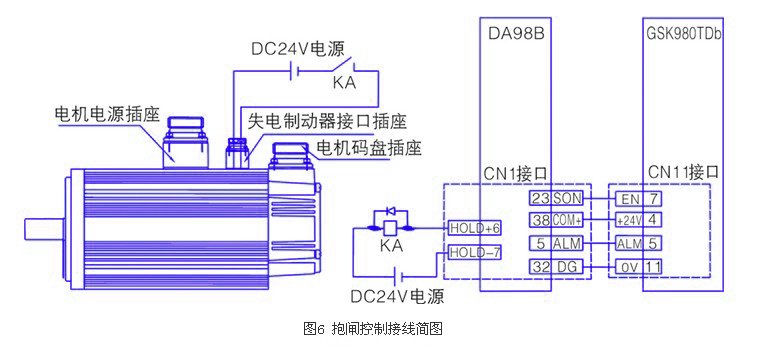
接線方法
基于以上分析,以gsk980tdb+da98b+帶失電制動器的sjt電機配置為例,圖6示出了控制抱閘的接線方法(限于篇幅,圖中僅示出了與抱閘控制相關的hold、alm、son等信號的接線,其它信號的連接方法請參閱相關的使用手冊),為防止gsk980tdb自帶電源盒功率不足導致失電制動器抱閘力矩不夠而引起工作臺下滑,圖中dc24v電源不應取自gsk980tdb的電源盒,須由用戶另外提供。
結束語
實際應用表明,該方法切切實實的解決了數控機床抱閘控制上、下電等情況工作臺下滑的難題,且接線簡單。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

