






pmsoft軟件介紹
與臺達plc的wplsoft軟件相似,dvp20pm的編程軟件pmsoft按照iec61131標準設計,具有梯形圖和語句表兩種編程方式,且具有g碼匯入、錯誤提示、區段注釋、裝置注釋、標尺、完善的監控窗口、運動指令追蹤等便利工具提供給用戶,特別值得一提的是該軟件具有運動軌跡仿真功能,當您編輯好程序后可利用此功能對加工軌跡進行模擬演示,參見圖5。
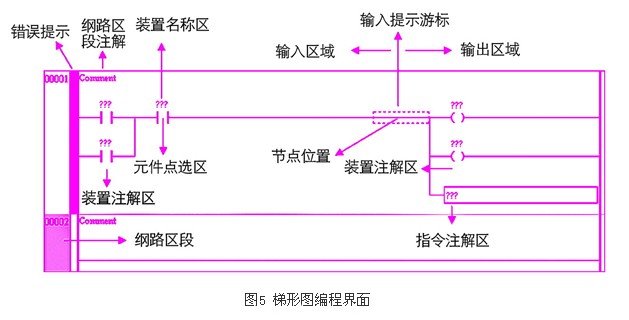
為方便切換階梯窗口,只要點選系統信息列中的樹枝狀對應的程序編號,自動切換對應的程序編輯窗口,在pmsoft編輯環境中同時只能有一個階梯圖窗口,這是為了在龐大復雜程序中找尋程序方便,同時將主程序、運動子程序、一般子程序這三種程序模塊化處理,o100主程序只有一個編輯窗口,oxn運動程序有100個編輯窗口,pm子程序有256個編輯窗口,總共有357個窗口,每個窗口未編輯都有10network。程序編輯由網絡區段組成,每個網絡區段是由輸入與輸出編輯區域所組成,在編輯過程中,自動產生邏輯結構正確的階梯圖,使用者無須再做額外補線的動作,網絡區段編輯并具有錯誤提示功能。
運動控制編程
相關概念
在談到dvp20pm產品的應用之前,我們對以下概念進行一個簡要介紹。
插補
插補是在組成軌跡的直線段或曲線段的起點和終點之間,按一定的算法進行數據點的密化工作,以確定一些中間點。從而為軌跡控制的每一步提供逼近目標。
逐點比較法是以四個象限區域判別為特征,每走一步都要將加工點的瞬時坐標與相應給定的圖形上的點相比較,判別一下偏差,然后決定下一步的走向。如果加工點走到圖形外面去了,那么下一步就要向圖形里面走;如果加工點已在圖形里面,則下一步就要向圖形外面走,以縮小偏差,這樣就能得到一個接近給定圖形的軌跡,其最大偏差不超過一個脈沖當量(一個進給脈沖驅動下工作臺所走過的距離)。
直線插補
這個概念一般是用在計算機圖形顯示,或者數控加工的近似走刀等情況下,以數控加工為例子:一個零件的輪廓往往是多種多樣的,有直線,有圓弧,也有可能是任意曲線,樣條線等。數控機床的刀具往往是不能以曲線的實際輪廓去走刀的,而是近似地以若干條很小的直線去走刀,走刀的方向一般是x和y方向。
插補方式有:直線插補、圓弧插補、拋物線插補、樣條線插補等等。
所謂直線插補就是只能用于實際輪廓是直線的插補方式(如果不是直線,也可以用逼近的方式把曲線用一段段線段去逼近,從而每一段線段就可以用直線插補了)。首先假設在實際輪廓起始點處沿x方向走一小段(一個脈沖當量),發現終點在實際輪廓的下方,則下一條線段沿y方向走一小段,此時如果線段終點還在實際輪廓下方,則繼續沿y方向走一小段,直到在實際輪廓上方以后,再向x方向走一小段,依次循環類推。直到到達輪廓終點為止。這樣,實際輪廓就由一段段的折線拼接而成,雖然是折線,但是如果我們每一段走刀線段都非常小(在精度允許范圍內),那么此段折線和實際輪廓還是可以近似地看成相同的曲線的--這即是直線插補。#p#分頁標題#e#
聯動與插補
一個點的空間位置需要三個坐標,決定空間位置需要六個坐標。
一個運動控制系統可以控制的坐標的個數稱做該運動控制系統的軸數。而可以同時控制運動的坐標的個數稱做該運動控制系統可聯動的軸數。聯動各軸的運動軌跡具有一定的函數關系,例如直線,園弧,拋物線,正弦曲線。直接計算得出運動軌跡的坐標值往往要用到乘除法,高次方,無理函數,超越函數,會占用很多的cpu時間。為了實時快速控制運動軌跡,往往預先對運動軌跡進行直線和圓弧擬合,擬合后的運動軌跡僅由直線段和圓弧段所組成,而計算運動軌跡時,每一點的運動軌跡跟據前一個坐標點的數據通過插補運算得到,這樣就把計算簡化為增量減量移位和加減法。
實現多軸聯動的直線插補并不困難,圓弧插補一般為兩軸聯動。插補運算可以有多種算法,例如“dda算法”,“逐點比較法”,“正負法”,“最小偏差法(bresenham 算法)”等,其中最小偏差法具有最小的偏差和較快的運行速度。
dvp20pm運動控制型plc可實現2軸聯動,支持直線和圓弧插補,以及相應的第三軸處理。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

