






什么是激光雷達(dá)?為什么說它是自動駕駛汽車的“眼睛”?它有哪些主要應(yīng)用?又面臨哪些機(jī)會和挑戰(zhàn)?Comet Labs合伙人Adam Kell用通俗的語言和大量實例解答了上述問題。
二、什么是激光雷達(dá)
三、激光雷達(dá)系統(tǒng)的應(yīng)用
面臨的機(jī)遇與挑戰(zhàn)")
面臨的機(jī)遇與挑戰(zhàn)")
激光雷達(dá)系統(tǒng)已經(jīng)找到了他們被應(yīng)用于人形機(jī)器人的方式——比如波士頓動力的這個機(jī)器人:
除了機(jī)器人頭部的激光雷達(dá)系統(tǒng)之外,這個機(jī)器人還使用其他傳感器,比如用光學(xué)相機(jī)來掃描類二維碼。
面臨的機(jī)遇與挑戰(zhàn)")
四、激光雷達(dá)面臨的機(jī)遇與挑戰(zhàn)
面臨的機(jī)遇與挑戰(zhàn)")
一、一個形象的比喻
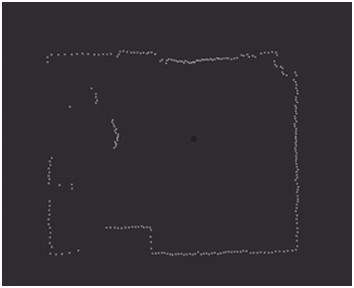
想象一下,你站在一個黑暗的房間里,你能感覺到周圍環(huán)境的唯一方式是伸出棍子觸碰物體。 首先,你徑直向前伸出棍子,棍子在伸出12英尺后撞擊到一個堅實的物體。 然后你向右伸出棍子,伸出8英尺后停止。接下來試試你的左邊,有12英尺。最后,在你的后方,棍子伸出了18英尺。于是,即使你看不到任何東西,也不移動身體,你也能獲得一些關(guān)于房間的信息。
如果你在不同的方向重復(fù)幾百或幾千次這樣子動作(并且記憶力極強(qiáng)),你將能夠根據(jù)物體和你的距離大致了解這個屋子的全貌。
圖1 針對一間屋子的墻的二維掃描
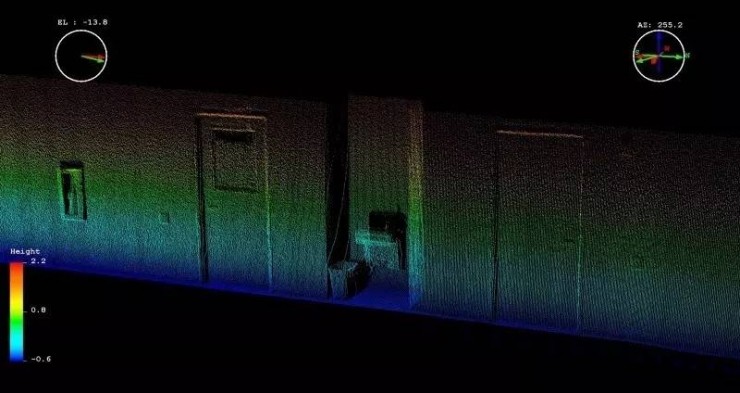
如果向上或向下傾斜棍子,你甚至能夠根據(jù)輪廓“看到”周圍的物體,如椅子和門。這些信息可以產(chǎn)生一個叫做“點云”的圖像,它是三維坐標(biāo)系中的一系列點。當(dāng)你擁有足夠多的點,就可以生成一個非常完整的基于點云的房間,像這樣:
圖2 針對墻和飲水機(jī)的三位掃描
二、什么是激光雷達(dá)
激光雷達(dá)(LIDAR,“光”和“雷達(dá)”的組合詞)是一種被設(shè)計用于快速構(gòu)建這些點云的傳感器。通過使用光來測量距離,激光雷達(dá)能夠非常快速地采集樣點——每秒高達(dá)150萬個數(shù)據(jù)點。這個采樣率使得該技術(shù)能夠部署在自動駕駛車輛等應(yīng)用上。
工作原理
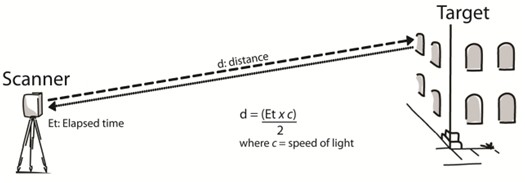
激光雷達(dá)測量光脈沖的飛行時間,進(jìn)而能夠判斷傳感器和物體之間的距離。想象一下,當(dāng)發(fā)出光脈沖時啟動秒表,然后當(dāng)光脈沖(從遇到的第一個物體反射出來)返回時停止計時器。通過測量激光的“飛行時間”,并且知道脈沖行進(jìn)的速度,就可以計算距離。光以每秒30萬千米的速度傳播,因此需要非常高精度的設(shè)備來產(chǎn)生關(guān)于距離的數(shù)據(jù)。
圖3 用激光當(dāng)“棍子”來測量距離
為了產(chǎn)生完整的點云,傳感器必須能夠非常快速地對整個環(huán)境進(jìn)行采樣。激光雷達(dá)能夠做到這一點的一種方式是通過在單個發(fā)射器/接收器上使用非常高的采樣率。 每個發(fā)射器每秒發(fā)射數(shù)萬或數(shù)十萬個激光脈沖。這意味著,多達(dá)100000個激光脈沖在1秒內(nèi)完成從激光器單元上的發(fā)射器到被測量的物體的往返行程,并返回到激光雷達(dá)單元上位于發(fā)射器附近的接收器。較大的系統(tǒng)具有多達(dá)64個這樣的發(fā)射器/接收器(它被稱為“線”)。多線使系統(tǒng)能夠每秒產(chǎn)生超過一百萬個數(shù)據(jù)點。
然而,64個固定線不足以映射整個環(huán)境——它只是在非常集中的區(qū)域給出非常清晰的分辨率。 由于光學(xué)中所需的精度,制造更多的線是非常昂貴的,因此在線數(shù)超過64后繼續(xù)增加線數(shù)會使成本急劇增加。因此,許多激光雷達(dá)系統(tǒng)使用旋轉(zhuǎn)組件或旋轉(zhuǎn)鏡來使線圍繞環(huán)境進(jìn)行360度掃描。常見的策略包括使單個發(fā)射器和接收器向上或下偏轉(zhuǎn)使激光器視野覆蓋范圍更大。 例如,Velodyne的64線激光雷達(dá)系統(tǒng)具有26.8度的垂直視角(通過旋轉(zhuǎn)使其擁有360的度水平視角)。這個激光雷達(dá)可以從50米開外看到一個12米高的物體的頂部。
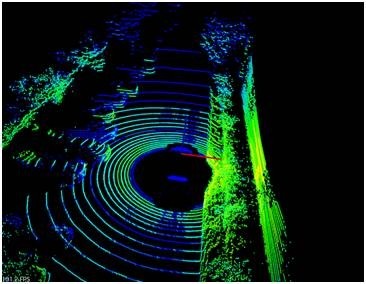
下圖中可以看到,距離激光雷達(dá)的遠(yuǎn)近不同,點云的疏密程度也不相同,這是由于數(shù)據(jù)保真度隨著距離而下降。雖然它不是完美的,但是較高分辨率可用于較近的物體,因為隨著到傳感器的距離增加,發(fā)射器之間的角度(例如,2度)會導(dǎo)致這些點帶之間的間隔更大。
圖4 旋轉(zhuǎn)的多線激光雷達(dá)產(chǎn)生的點云
三、激光雷達(dá)系統(tǒng)的應(yīng)用
點云可用于再現(xiàn)景觀或環(huán)境的三維模型,一些應(yīng)用包括:
用于監(jiān)測侵蝕或其他變化的地質(zhì)測繪/成像
監(jiān)測農(nóng)作物和樹木的生長情況
為建筑項目做測量工作
對垃圾填埋場進(jìn)行準(zhǔn)確的體積預(yù)測
最常見的應(yīng)用大概是一個激光雷達(dá)系統(tǒng)集成在一輛自動駕駛汽車上——例如Top Gear的一輛卡車使用激光雷達(dá)系統(tǒng)進(jìn)行越野自主導(dǎo)航。
圖5 全速行駛的自動駕駛卡車
下面的片段中,你可以看到景物的點云,以及附加的功能(綠色的小方塊代表可以駛過的物體,如植物;紅色的小方塊代表不應(yīng)駛過的物體——如巖石,樹木和汽車)。其他一些軟件模塊也能對原始點云進(jìn)行理解,并將障礙物分類。
圖6 全速行駛的自動駕駛卡車
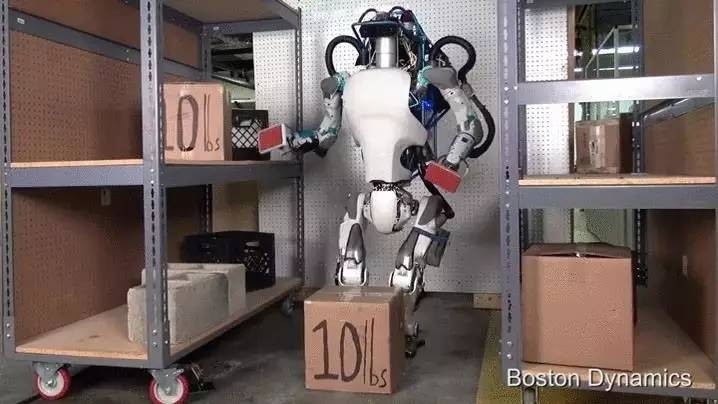
激光雷達(dá)系統(tǒng)已經(jīng)找到了他們被應(yīng)用于人形機(jī)器人的方式——比如波士頓動力的這個機(jī)器人:
圖7 波士頓動力的Atlas
除了機(jī)器人頭部的激光雷達(dá)系統(tǒng)之外,這個機(jī)器人還使用其他傳感器,比如用光學(xué)相機(jī)來掃描類二維碼。
激光雷達(dá)應(yīng)用的另一個例子是水平安裝在無人機(jī)上的用于繪制地面等高圖的傳感器。來自激光雷達(dá)的點云數(shù)據(jù)與無人機(jī)自身的位置數(shù)據(jù)結(jié)合產(chǎn)生出了這些等高線。
圖8 搭載Phoenix Aerial系統(tǒng)的無人機(jī)對地面進(jìn)行測繪
四、激光雷達(dá)面臨的機(jī)遇與挑戰(zhàn)
4.1 機(jī)遇
激光雷達(dá)在智能機(jī)器生態(tài)系統(tǒng)中有很多機(jī)遇。與使用二維圖像相比,點云能夠更容易的被計算機(jī)使用,用于構(gòu)建物理環(huán)境的三維形象——二維圖像是人腦最容易理解的數(shù)據(jù),而對于計算機(jī)來說,點云是最容易理解的。
Scanse的一款價值250美元的名為“sweep”的二維激光雷達(dá)掃描器可在戶外使用,并專為移動、低功耗應(yīng)用而設(shè)計。它只用了競爭對手近四分之一的成本,這將給這類傳感器帶來全新的應(yīng)用(我們在很多其他類型的傳感器中已經(jīng)看到過這樣的現(xiàn)象)。 二維激光雷達(dá)也可以被搭載到另一個旋轉(zhuǎn)的元件上以產(chǎn)生環(huán)境中完整的三維點云。
圖9 Scanse的Sweep掃描的三維環(huán)境
其他公司正在尋求降低系統(tǒng)成本的其他策略,例如Quanergy的固態(tài)激光雷達(dá)。該系統(tǒng)大體與上文已介紹的系統(tǒng)相同,然而,與使用旋轉(zhuǎn)光學(xué)器件來移動光束不同的是,它們使用 “相控陣列光學(xué)系統(tǒng)”來引導(dǎo)激光脈沖的方向,它可以在某一方向上釋放一個激光脈沖,而讓下一個脈沖(1微秒之后)瞄準(zhǔn)視野中的其它地方。
轉(zhuǎn)載請注明出處。

 相關(guān)文章
相關(guān)文章
 熱門資訊
熱門資訊
 精彩導(dǎo)讀
精彩導(dǎo)讀
























 關(guān)注我們
關(guān)注我們

