






近日,美國當地政府關于特斯拉的一份報告出爐了,報告的內容是對去年一名男子駕駛特斯拉喪生的調查。
雖然這份報告的結果顯示,這名男子違規操作,在長達37分鐘的時間內,只有25秒鐘把手放在方向盤上的,其間被系統警告了7次之多。
但我們仍然失望,自動駕駛的時代,到底什么時候才能真正到來呢?
要回答這個問題,我們繞不開的一個技術是:激光雷達。這是自動駕駛技術中,精準度最高的技術,可特斯拉偏偏不用它。
為什么特斯拉不買賬?
激光雷達到底有哪些痛點沒有攻克?這到底是一種怎樣的技術?它現在的發展狀況又如何?
不著急!在我們開始這篇知識裝逼掃盲貼之前,先來觀瞻一下當下的自動駕駛核心技術的格局:
如今的天下,主要分為兩大技術門派:
超能力


聲吶

雷達
 雷達(radar: radio direction and ranging),與聲吶類似,也是一場臭名昭著的世界大戰(第二次世界大戰)的產物。雷達利用無線電波測距,而非聲波或光束。我們在Homer上部署了大量雷達(Delphi傳感器),測試驗證,它可以精確檢測并追蹤200m范圍的物體。
雷達(radar: radio direction and ranging),與聲吶類似,也是一場臭名昭著的世界大戰(第二次世界大戰)的產物。雷達利用無線電波測距,而非聲波或光束。我們在Homer上部署了大量雷達(Delphi傳感器),測試驗證,它可以精確檢測并追蹤200m范圍的物體。
激光雷達
激光雷達用于自動駕駛
攝像頭所驅動的自動駕駛
激光雷達的未來
雖然這份報告的結果顯示,這名男子違規操作,在長達37分鐘的時間內,只有25秒鐘把手放在方向盤上的,其間被系統警告了7次之多。
但我們仍然失望,自動駕駛的時代,到底什么時候才能真正到來呢?
要回答這個問題,我們繞不開的一個技術是:激光雷達。這是自動駕駛技術中,精準度最高的技術,可特斯拉偏偏不用它。
為什么特斯拉不買賬?
激光雷達到底有哪些痛點沒有攻克?這到底是一種怎樣的技術?它現在的發展狀況又如何?
不著急!在我們開始這篇知識裝逼掃盲貼之前,先來觀瞻一下當下的自動駕駛核心技術的格局:
如今的天下,主要分為兩大技術門派:
"谷歌派"和“特斯拉派”
其中,“谷歌派”包括:谷歌、百度、Uber、豐田、福特等幾乎所有的主流車廠,而“特斯拉派”包括:不好意思只有特斯拉一家(小團隊還是有一些的)。因此被劃分為兩派,其最大的技術分歧就在于——激光雷達到底是否不可替代。
在谷歌派看來,激光雷達必然是未來趨勢,而特斯拉掌門馬斯克卻偏偏不理睬。
對此,馬斯克主要的理由是:激光雷達不是必須的。
特斯拉在自動駕駛布局上,采用了毫米波雷達+超聲波雷達+攝像頭的組合,之所以不采用激光雷達的解決方案,恰恰是因為激光雷達成本高昂,不利于大規模市場化。
的確,價格高昂這是激光雷達最大的致命點。
谷歌早期購置一臺64線激光雷達,單價能達到73000美元,這都直逼汽車本身的價格了好嗎?
除此以外,體積大也是激光雷達的一大問題。
喏,谷歌的無人小車上那個又大又難看的帽子就是咯。
再一個問題就是,產能低。
汽車廠商要拿到一臺全新的激光雷達產品,至少要等6個月...
價格高、體積大、產能低,這三點強烈制約著激光雷達的商業化。
那么問題來了,既然這么麻煩,為啥除了特斯拉,所有的互聯網公司,車廠都為激光雷達站臺呢?
不為別的,就因為激光雷達精準啊,上路開車,這玩意可不是開玩笑的。
你看特斯拉輔助駕駛所出的車禍,真叫人一個膽戰心驚啊。
OK,到這里,就讓我們開啟一場激光雷達之旅吧。
本文接下來的內容將詳解激光雷達,并溯源它的自動駕駛歷程,以及它同其他相關傳感器的長短之爭。另外,還有各色炫圖伺候,Enjoy!
超能力
當自動駕駛汽車(或任意一種機器人)裝備激光雷達后,它們在感知世界上將具備一些“超能力”:
·持續360度可視——任何時候可以看見任何方向的世界;
·超高精度測距——總是能知道周圍物體距離你的精確距離(測距誤差正負2cm)。
如果你以前見過自動駕駛汽車,那你很可能看到過激光雷達,它們正是那個安裝在車頂上不斷旋轉的大盒子,如下圖所示安裝在UBER和百度的自動駕駛汽車上。
市場上最流行的激光雷達之一,是高功率的Velodyne HDL-64E,比如安裝在Homer車頂的這部(下圖):
激光雷達工作原理
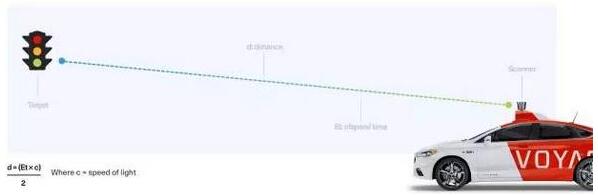
一個傳感器如何能具備360度視野,同時還能精確測距?簡單來說,激光雷達不斷發射激光束,然后通過測量激光返回傳感器的時間來感知世界。
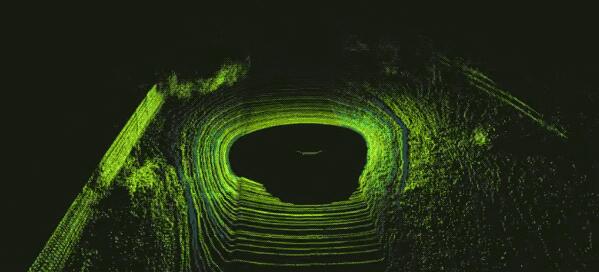
激光雷達一秒可發射數百萬束激光,所獲得的測量足以構建出一個真實的視覺化3D世界。這意味著,你可以推斷出周圍(最大距離60m,不同的傳感器參數可能不同)任何物體的精確位置。
激光雷達歷史
為了理解人們采用激光雷達來實現自動駕駛的原因,我們需要了解一下與激光雷達相似的其他技術。
聲吶
最原始的距離感知機器是蝙蝠(5千萬年歷史)。蝙蝠(或海豚,等)利用回聲定位實現與激光雷達相同的距離檢測能力。回聲定位,又稱聲吶(sonar: sound navigation and ranging),是利用聲波來進行測距,而非如激光雷達所用的光波。
蝙蝠誕生5千萬年后,第一次世界大戰的爆發促成了人造聲吶傳感器的首次部署,以增強潛艇的水下作戰能力。由于聲音在水中的可傳輸距離比可見光或無線電遠得多,聲吶在海戰中有著得天獨厚的優勢。而今,聲吶也被廣泛用于汽車,主要用作停車傳感器。停車雷達只需知道墻面距離汽車多遠,是一種短距離(約5m)效果很好且成本低廉的傳感器。但是,聲吶并未被證明可用于自動駕駛汽車所需要的各種距離(60m+)。
雷達
雷達幾乎沒有缺點。極端天氣也不會影響它的效果,且造價極其低廉。雷達不僅被廣泛用于目標檢測,還可被用于物體追蹤(舉例來說:監測一輛車的行進速度和方向)。雷達沒有激光雷達那樣的高分辨率,但是兩者非常互補,不會沖突。
激光雷達
激光雷達誕生于1960年代,緊隨激光時代而來。1971年,阿波羅15號執行任務時,宇航員利用激光雷達技術繪制月球表面地圖,向公眾首次展示激光雷達技術的實用價值。
該技術在用于自動駕駛領域之前,激光雷達主要應用在考古學領域。在大面積土地測繪方面,激光雷達發揮了巨大的作用,農業和考古學都極大地受益于此。
BBC用一篇題為“ 激光雷達為一片不為人知的地域帶來光明”的報道,特別詳盡地介紹過它在考古學中的巨大應用價值。
直到2000年以后,激光雷達才首次被用于汽車。在2005年的DARPA自動駕駛挑戰賽中,Stanley(以及后來的Junior)首次成功完成挑戰,讓激光雷達一戰成名。
Stanley是2005年DARPA自動駕駛挑戰賽的冠軍,其車頂上安裝了5部SICK 激光雷達,并且配備了一部軍用級GPS,以及陀螺儀、加速計與一個觀測距離達80m+的前置攝像頭。這些傳感器由一臺擁有6個1.6Ghz奔騰處理器的Linux電腦控制。
使用SICK激光雷達(2005年挑戰賽的許多車輛均有使用)最根本的挑戰,是在于每束激光只能掃描到整個空間某一切面上的觀測結果,因此必須仔細調整激光指向。許多隊伍將其放置在一個傾斜臺子上,使其掃描到一定程度的空間結果。簡要說來,SICK是一個2D激光雷達(一個方向發射少量光束),現代激光雷達是3D的(所有方向發射大量光束)。
Velodyne時代
提到激光雷達,不得不提這么一家公司——Velodyne。
長期以來,Velodyne都是激光雷達行業領頭者,不過,人起家可不是靠這個。
在1983年,Velodyne是一家專注于低頻音波以及重低音音箱技術的音響公司。重低音音箱會包含傳感器、DSP和DSP控制算法等部件。
就在Stanley出現的那個時候,Velodyne轉變為了激光雷達公司。
在2004年首次DARPA挑戰賽上,Velodyne創始人David和Bruce Hall以隊伍DAD(Digital Audio Drive)參賽。在2005年的第二次DARPA比賽中,David Hall發明了三維的基于激光掃描的實時系統并申請專利,奠定了其今日激光雷達產品的基礎。
在2007年的第三屆DARPA比賽中,大部分隊伍便已經使用了此項三維的激光技術作為其感知系統的基礎。
現在,David Hall的這項發明作為驅動自動駕駛技術發展的關鍵技術突破陳列在美國國立博物館。
Velodyne的首款激光雷達掃描器直徑約30英尺,重約100磅。通過將激光雷達技術商用而非只用于比賽,激光雷達的尺寸和重量被大幅降低,并且性能也得到提升。
在2007年的DARPA城市比賽中,Velodyne的HDL-64E激光雷達成為地形圖構建和障礙檢測的關鍵方法,被眾多top隊伍使用,其中6個完成比賽的隊伍中有5個使用了此傳感器,包括冠軍和亞軍隊伍。有些隊伍嚴重依賴于激光雷達對環境的探測信息,導航自動裝置通過構建的復雜城市環境。(來自Wikipedia)
激光雷達用于自動駕駛
為什么將激光雷達用于自動駕駛?一句話:三維地圖!
激光雷達可以得到物體的高精度的空間三維信息,相當于產生一幅巨大的三維地圖(它的原始應用!),然后據此對其中的汽車或者機器人進行導航。當使用激光雷達進行感知和導航時,你可以提前知道一個湖的邊界線,或者知道500m后會有一個停車標志或交通信號燈。這種預測技術正是自動駕駛汽車所需要的,其成功應用是過去五年來自動駕駛技術進步的重要原因。
目標檢測
激光雷達的分辨率越來越高,探測距離越來越長,使得其開始被用于物體檢測和跟蹤。激光雷達不僅可以使你準確知道所處的三維位置和幫助導航,而且還可以檢測和跟蹤諸如汽車、行人,Waymo甚至還說可以追蹤橄欖球頭盔。
現代激光雷達系統能夠區分行進的是行人還是自行車,甚至能夠給出其行進的速度和方向。
以其出色的導航能力、預測能力,以及其高分辨的物體跟蹤能力,激光雷達成為現代自動駕駛汽車的關鍵傳感器,目前其統治地位還很難撼動。除非….
攝像頭所驅動的自動駕駛
現在也有一些公司主張不使用激光雷達,完全通過攝像頭(可能還有雷達)來實現自動駕駛。特斯拉就是其中之一,馬斯克也極力推廣該方案,認為人類可以通過眼睛、耳朵和大腦在世界中行走自如,為什么汽車就不可以呢?
我相信這一路徑肯定也能得出一些激動人心的成果,特別是當Comma、AutoX這樣的優秀團隊紛紛向著這個目標努力時。
需要指出的是,特斯拉非常看重產能,他們希望一年能很快地產出50萬輛車。因此,他們對激光雷達技術將來的成本下降不感興趣,他們需要的是現成的低成本技術。
激光雷達的未來
激光雷達行業的發展主要關注:成本的降低,精度以及測距范圍的提升。
成本降低
強大的激光雷達單元現在需要近80k美元,然而,固態激光雷達能把價格降到低于1000美元。LedderTech是此早期市場的領軍者。
以下是Velodyne關于固態激光雷達的觀點:
由于需要嵌入式傳感器尺寸小且成本低,這推動了固定的固定傳感器的研發,當然這樣也意味著傳感器的觀測范圍會變小。
Velodyne支持固定的和旋轉的傳感器。固定傳感器可以作為嵌入式微型傳感器。從成本角度分析,固定和旋轉的激光雷達均包含透鏡、激光和探測器。旋轉式的傳感器共用一套透鏡、激光和探測器,而固定式的傳感器需要多套透鏡、激光和探測器。因此,旋轉式的成本更低,且由于可以減少實時合并不同點的探測視圖所帶來的誤差(當物體在高速行進時這一點非常重要)性能也非常強大。
精度和距離提高
激光雷達技術應用數量激增,這促使許多頂尖的個人和團隊紛紛建立公司研發相關產品。更高的精度、更遠的跟蹤范圍(某些場景可達200m)將得到更好的目標識別跟蹤性能,這也是Luminar之類的創業公司之間最大的區分點。
寫在結尾:
如今,激光雷達這只攔路虎正在快速迎來它的大好未來。
提提兩個特大的利好消息。
一個來自谷歌,一個來自Velodyne。
在2017年1月的底特律車展上,谷歌旗下自動駕駛公司Waymo放出重磅消息:稱其已將激光雷達的成本下降了90%以上。
而隨后,激光雷達的祖師爺Velodyne也大秀肌肉,稱2018年能生產高達100萬枚激光雷達,并在未來使激光雷達的單價下降至50美元以下。
如此,激光雷達就要真正雄霸自動駕駛的天下了?
等它大規模商業化了,也許真正的自動駕駛的時代,就到來了。
轉載請注明出處。


 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

