





集成光子電路中實現的光學相控陣(OPA)可以用于各種3D成像和傳感、照明、測距以及新興激光雷達(LiDAR)技術中。但是,當前的集成式OPA方法受控制復雜性、功耗高或光學效率低等因素限制,無法支持中遠距離激光雷達所需的大孔徑。
據麥姆斯咨詢報道,近期,科羅拉多大學博爾德分校(University of Colorado Boulder)的研究人員開發出硅基蛇形光學相控陣(SOPA)芯片。SOPA概念的關鍵是使用一維光柵耦合器和另一條呈蛇形來回折疊的延遲線。這樣可以控制整個OPA單個可調諧激光器的頻率,完全不需要移相器。SOPA基于一系列低損耗光柵波導,并支持無源、2D波長的光束操縱,通過改變波長來控制光束。可以同時控制多個相控陣以創建更大孔徑、更高分辨率的圖像。尺寸緊湊、受波長控制的多個瓦片(英文:tile,放大后看像屋頂瓦片,因此這里意譯為“瓦片”)可以有效地封裝成陣列形式,無需主動控制,節省空間的設計可擴大SOPA的孔徑。
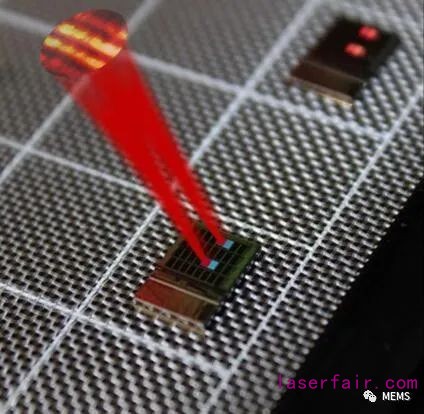
硅基SOPA瓦片陣列芯片。8 x 4陣列中的32片瓦片設計略有不同,圖中顯示了兩片匹配的瓦片以“點亮”該視角。疊加的光束來自兩片匹配瓦片,遠場干涉光束團展示了瓦片對波束的形成。
研究人員稱SOPA可以提高激光雷達系統的分辨率和掃描速度,減小體積,并可擴展到自動駕駛汽車、智能手機等多種應用。
“我們已經找到了如何將二維‘彩虹’集成到一顆小芯片的方法。”論文作者之一Kelvin Wagner教授說。
對單個SOPA瓦片的研究分析
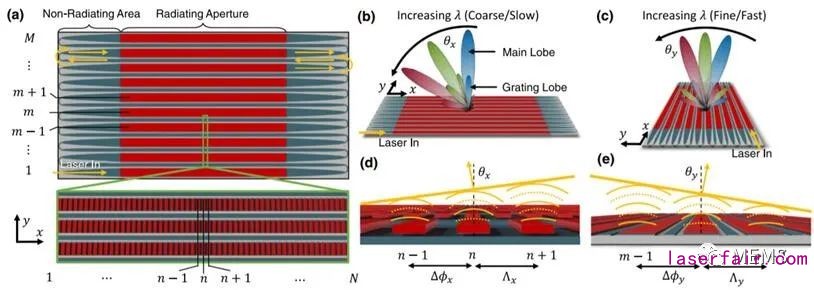
操縱2D波長的單個SOPA瓦片示意圖。(a)單個SOPA瓦片拓撲示意圖;M行光柵波導陣列(紅色)呈蛇形排布,與反激(藍色)串行連接。每行有N個光柵周期。(b)對光束的粗略(慢)操縱。(c)對光束的精細(快)操縱。(d)沿θx的粗略操縱,每個光柵波導將光衍射到與波長相關的齒到齒相位延遲決定的角。(e)沿θy方向的精細微調,光柵陣列將光衍射到與波長相關的行到行相位延遲決定的角度。
研究人員展示了SOPA瓦片對1450 nm~1650 nm波長的掃描,在緊湊陣列中產生16500個可尋址光點。他們演示了在單個硅光子芯片上從兩個單獨的OPA發出的光束進行遠場干擾的陣列方法。
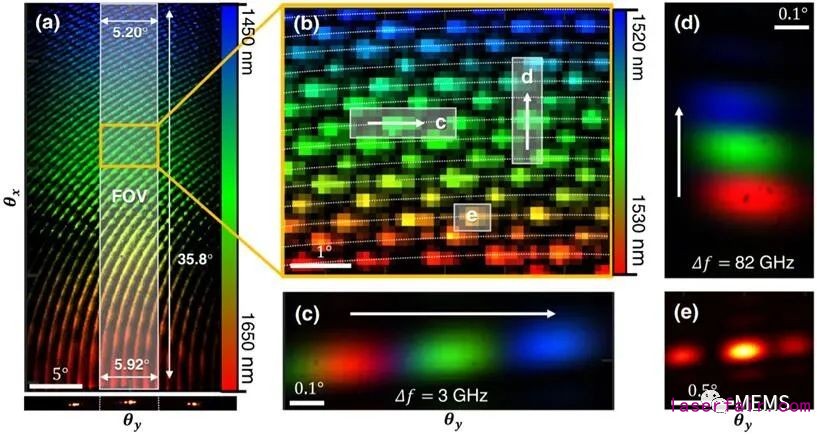
用單個SOPA瓦片演示2D波長操縱效果。(a)200 nm掃描的遠場拍攝圖像,從16500個樣本中只取樣到1500個點。光柵瓣極限視場角為35.8° x 5.5°。為獲得可見度,采用掃描欠采樣(取樣率約10%)和飽和過度曝光的后處理,導致對角線曲線非實際掃描軌跡,曲率由群速度色散導致。底部顯示了1550 nm處的光斑圖,以顯示光柵波瓣受限的視場。(b)A 5° × 5.5°全掃描的分段,只有70個樣本。真實的掃描軌跡用虛線表示以引導人眼觀察,對顏色進行重新編碼以適應較窄的帶寬。(c)快軸波長掃描,三個不相鄰的點間距為3 GHz。(d)慢軸波長掃描,三個不相鄰的點間距為82 GHz。(e)1550 nm處的單波長光斑。
SOPA瓦片陣列,實現大光學孔徑
單片SOPA瓦片提供的光學孔徑有限,研究人員進一步研究SOPA瓦片陣列的方式。SOPA瓦片進行平鋪,實現陣列,可以有效擴展光學孔徑。概念很簡單:相同數組OPA并聯供電,只有一個激光器提供光源,每個OPA前都有一個單相移位器,便于陣列級波束操縱。所有的OPA在發射的同時,光束被操縱到遠場某處進行疊加,并在目標處發生相干干涉。
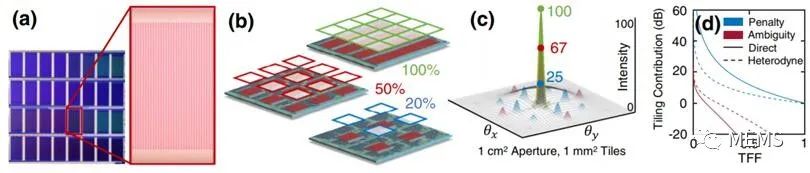
SOPA瓦片陣列形式的光束操縱。(a)完成制造的SOPA瓦片陣列的圖像。(b)不同瓦片填充系數(TFF)的SOPA瓦片陣列示意圖。(c)不同TFF值的SOPA瓦片陣列產生的輻射圖型(放大20倍)。(d)用于直接檢測和外差檢測時,TFF值與信噪比的關系圖。
結論
研究人員認為,SOPA設計是一種非常有前景的解決方案,可實現易于控制的大孔徑、2D光束操縱,服務于遠距離集成光子激光雷達等應用。
無論是安裝在自動駕駛汽車車頂,還是嵌入到智能手機或增強現實(AR)游戲設備,激光雷達都是面向消費者和企業的未來技術。“我們提出了一種使用芯片技術擴展激光雷達光學孔徑,提高視場角的方法。這是研究工作的第一步,也是最重要的基礎工作。”論文第一作者Nathan Dostart表示,他將繼續在弗吉尼亞州的NASA蘭利研究中心工作。
轉載請注明出處。


 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀














 關注我們
關注我們

